用語集¶
OpenScenario¶
シナリオを記述する形式として,ASAM(Association for Standardization of Automation and Measuring Systems)より提案されています. https://www.asam.net/standards/detail/openscenario/
OpenDrive¶
道路を記述する形式として,ASAM(Association for Standardization of Automation and Measuring Systems)より提案されています. https://www.asam.net/standards/detail/opendrive/
評価シナリオ¶
自動運転のシナリオには.その抽象度に応じて複数の呼び名があります.「カットインシナリオ」などのシナリオ分類は抽象度の高いシナリオと見做すことができ,ファンクショナルシナリオと呼ばれています.
本マニュアルにおける「評価シナリオ」は,シミュレーションを実行する際に必要となるすべての情報を含む(=抽象度の低い)「コンクリートシナリオ」を意味します,すなわち,シナリオ分類とそのシナリオを記述するパラメータの具体的な数値を含んでいます.以下に一例を示します.
項目 |
数値例 |
単位 |
|---|---|---|
シナリオ分類 |
4 |
[-] |
\(V_{e0}\) |
50.0 |
[km/h] |
\(V_{o0}\) |
30.0 |
[km/h] |
\(V_{e0}-V_{o0}\) |
20.0 |
[km/h] |
\(d_{x0}\) |
20.0 |
[m] |
\(V_{y}\) |
1.1 |
[m/s] |
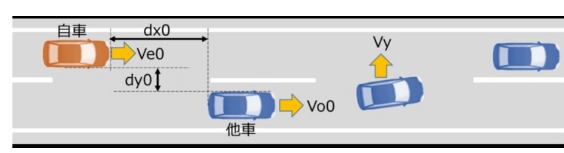
本図は自工会発行「自動運転の安全性評価フレームワーク Ver 3.0」より引用しました.¶
評価仕様¶
評価シナリオを定義します.一つの評価仕様が複数の評価シナリオを定義する場合,それらは共通のシナリオ分類を持ちます.以下にその一例を示します.
項目 |
評価シナリオ1 |
評価シナリオ2 |
|---|---|---|
シナリオ分類 |
4[-] |
4[-] |
\(V_{e0}\) |
50.0[km/h] |
50.0[km/h] |
\(V_{o0}\) |
30.0[km/h] |
30.0[km/h] |
\(V_{e0}-V_{o0}\) |
20.0[km/h] |
20.0[km/h] |
\(d_{x0}\) |
20.0[m] |
20.0[m] |
\(d_{y0}\) |
1.0[m] |
1.0[m] |
\(V_{y}\) |
1.1[m/s] |
1.2[m/s] |
ODD¶
Operational Design Domain (運行設計領域)のこと. 自動運転車の安全設計ガイドライン を参照のこと.
Distribution Type¶
実データの分布を近似するモデルのタイプ.現時点で3タイプ(Normal:正規分布,Exponential:指数分布,Beta:β分布が用意されています.
AIC:「赤池情報量基準」¶
実データの分布を近似する統計モデルの良さを評価する指標です.詳細は https://ibisforest.org/index.php?AIC などを参照してください.
Class Frequency¶
実データの分布を表す棒グラフの数を表します.
疑似曲率¶
道路形状からではなく自車の軌跡情報から算出したものであり,データ収集時の条件や環境によって 算出結果にばらつきが生じるため疑似的に決められた曲率として定義.