⑤ 評価シナリオのシミュレーション実行¶
作成した評価シナリオファイルに基づいてシミュレーションを行います.お客様が使用されている交通シミュレーションソフトを用いてシミュレーションを行います.
シミュレーションで用いるファイル¶
例1 評価仕様「No4_Foreseeable」に基づく評価シナリオファイルの作成/ダウンロード ではOpenScenarioファイルを3個,OpenDriveファイルを1個作成しました.合計3個のシミュレーションを行いますが,OpenDriveファイルは各シミュレーションで共通に使用します.
例2 評価仕様「No4_Preventable」に基づく評価シナリオファイルの作成/ダウンロード ではOpenScenarioファイルを16個,OpenDriveファイルを1個作成しました.合計16個のシミュレーションを行いますが,OpenDriveファイルは各シミュレーションで共通に使用します.
シミュレーション実行前の準備¶
OpenScenarioファイルやOpenDriveファイルを読み込めないシミュレーションソフトを利用されている場合,それらを参考にしてシミュレーションの環境を準備します
OpenScenarioファイルやOpenDriveファイルを読み込めるシミュレーションソフト ※1 を利用されている場合,それらを読み込むように設定してください.しかしながら,必要な情報が不足して,そのままではシミュレーションが期待通りに動作しないことがあります.シミュレーションソフトの必要事項に合わせてOpenScenarioファイルやOpenDriveファイルを修正してください ※2 .
※1 DIVP® : Driving Intelligence Validation Platform, CARLA 等
※2 ここで採り上げたシナリオ「No.4」では,自車と他車は走行しているシーンからスタートします.シミュレーションソフ トCARLA で自車を自動運転モードで走行させたい場合,自車を停止状態からスタートさせる必要があります.すなわち,自車停止状態からシナリオ「No.4」の開始シーンまでのシナリオを追加する必要があります.
シミュレーション実行および結果の記録¶
お手持ちのシミュレーションソフトを用いて各評価シナリオを実行します.そしてシミュレーション結果をテキストエディタ等を使ってjsonファイルに記録します.
評価仕様「No4_Foreseeable」の例に採り説明します.以下の評価シナリオファイルに対してシミュレーションを実行します.
43e11c28_TRAFFIC-DISTURBANCE-No4-00000001.xosc
43e11c28_TRAFFIC-DISTURBANCE-No4-00000002.xosc
43e11c28_TRAFFIC-DISTURBANCE-No4-00000003.xosc
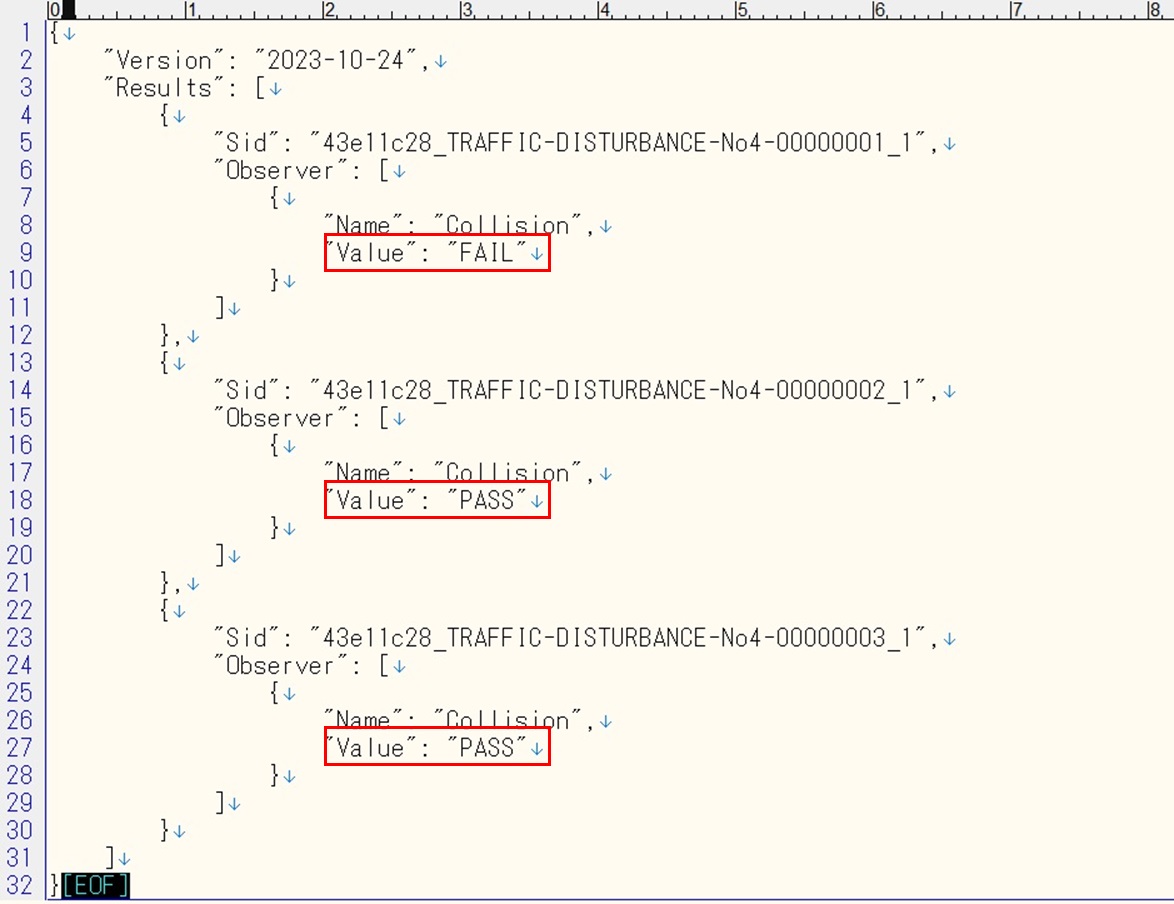
それぞれのシミュレーション結果をjsonファイル(43e11c28_sim_result.json)に反映します.jsonファイルには各評価シナリオ毎に変数「Value」を指定する箇所があり,衝突回避した場合は「PASS」を,衝突した場合には「FAIL」を記入します ※ .
たとえば,シナリオ番号1(評価シナリオファイル:43e11c28_TRAFFIC-DISTURBANCE-No4-00000001.xosc)のみ衝突し,それ以外は衝突回避した場合には以下のように記載します.
※ 「Value」の初期値は「FAIL」となっているので必要に応じて書き換えてください.
この評価でのシナリオ情報は下記のようになります.
評価シナリオ番号 |
1 |
2 |
3 |
\(V_{e0}\) [km/h] |
50 |
50 |
50 |
\(V_{o0}\) [km/h] |
30 |
30 |
30 |
\(d_{x0}\) [m] |
20 |
30 |
40 |
\(V_{y}\) [m/s] |
1.1 |
1.1 |
1.1 |
×衝突/〇衝突回避 |
× |
〇 |
〇 |
評価仕様「No4_Preventable」では以下の16個の評価シナリオファイルに対してシミュレーションを実行します.
7a1532f9_TRAFFIC-DISTURBANCE-No4-00000001.xosc
7a1532f9_TRAFFIC-DISTURBANCE-No4-00000002.xosc
:
7a1532f9_TRAFFIC-DISTURBANCE-No4-00000016.xosc
それぞれのシミュレーション結果をjsonファイル(7a1532f9_sim_result.json)に反映します.例えば,シナリオ番号が奇数の時に衝突し,偶数の時に衝突回避した場合は以下のように記載します.
{
"Version": "2023-10-25",
"Results": [
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000001_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000002_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000003_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000004_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000005_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000006_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000007_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000008_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000009_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000010_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000011_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000012_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000013_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000014_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000015_1",
"Observer": [
{
"Name": "Collision",
"Value": "FAIL"
}
]
},
{
"Sid": "7a1532f9_TRAFFIC-DISTURBANCE-No4-00000016_1",
"Observer": [
{
"Name": "Collision",
"Value": "PASS"
}
]
}
]
}
参考として各評価シナリオの情報を再掲します.16個の評価シナリオのシミュレーション結果(衝突回避/衝突)を回避可能/不可能に一致させるように設定しました.
評価シナリオ番号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
\(V_{e0}\) [km/h] |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
\(V_{o0}\) [km/h] |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
\(d_{x0}\) [m] |
23 |
27 |
18 |
22 |
15 |
19 |
14 |
18 |
12 |
16 |
11 |
15 |
11 |
15 |
10 |
14 |
\(V_{y}\) [m/s] |
0.35 |
0.35 |
0.5 |
0.5 |
0.65 |
0.65 |
0.8 |
0.8 |
0.95 |
0.95 |
1.1 |
1.1 |
1.25 |
1.25 |
1.4 |
1.4 |
×回避不可能/〇可能 |
× |
〇 |
× |
〇 |
× |
〇 |
× |
〇 |
× |
〇 |
× |
〇 |
× |
〇 |
× |
〇 |