② 回避可能な範囲の定義¶
UN規則(第157号) に,シナリオ「No.2」「No.4」「No.5」の「回避可能な」範囲の計算方法が示されています ※1.本章ではこのUN規則に基づく シナリオ「No.4」の「回避可能な」範囲を定義する手順を説明します ※2.
※1 「回避可能な」範囲は「Annex 4 - Appendix 3 Guidance on Traffic disturbance critical scenarios for ALKS」として記載されたものであり,参考としてご活用ください.
※2 UN規則(第157号)において,シナリオ「No.2」「No.4」「No.5」はそれぞれ「DECELARATION」「CUTIN」「CUTOUT」として表記されています.
シナリオの選定¶
「Scenario Database」のタブに移動してください.
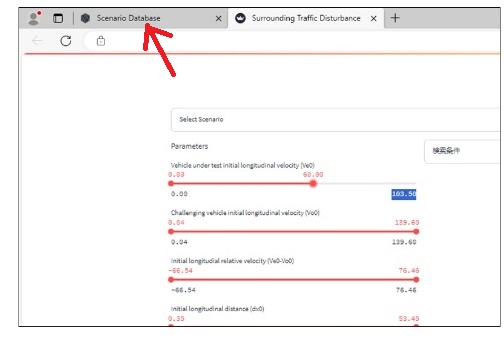
画面左側にある上から3番目のアイコン ※ を左クリックしてください.

※ シナリオデータベースのアイコンの名称/意味 はリファレンスに記載しました.¶
Reference Driver Modelの画面が表示されます ※.「回避可能な」範囲はこの画面を通じて定義していきます.
※ Reference Driver Modelとは模範となるドライバの動作を再現するモデルの事を意味しています.本節で説明する「回避可能な」範囲とは,より正確に述べると,「模範となる人間ドライバが回避可能な」範囲となります.
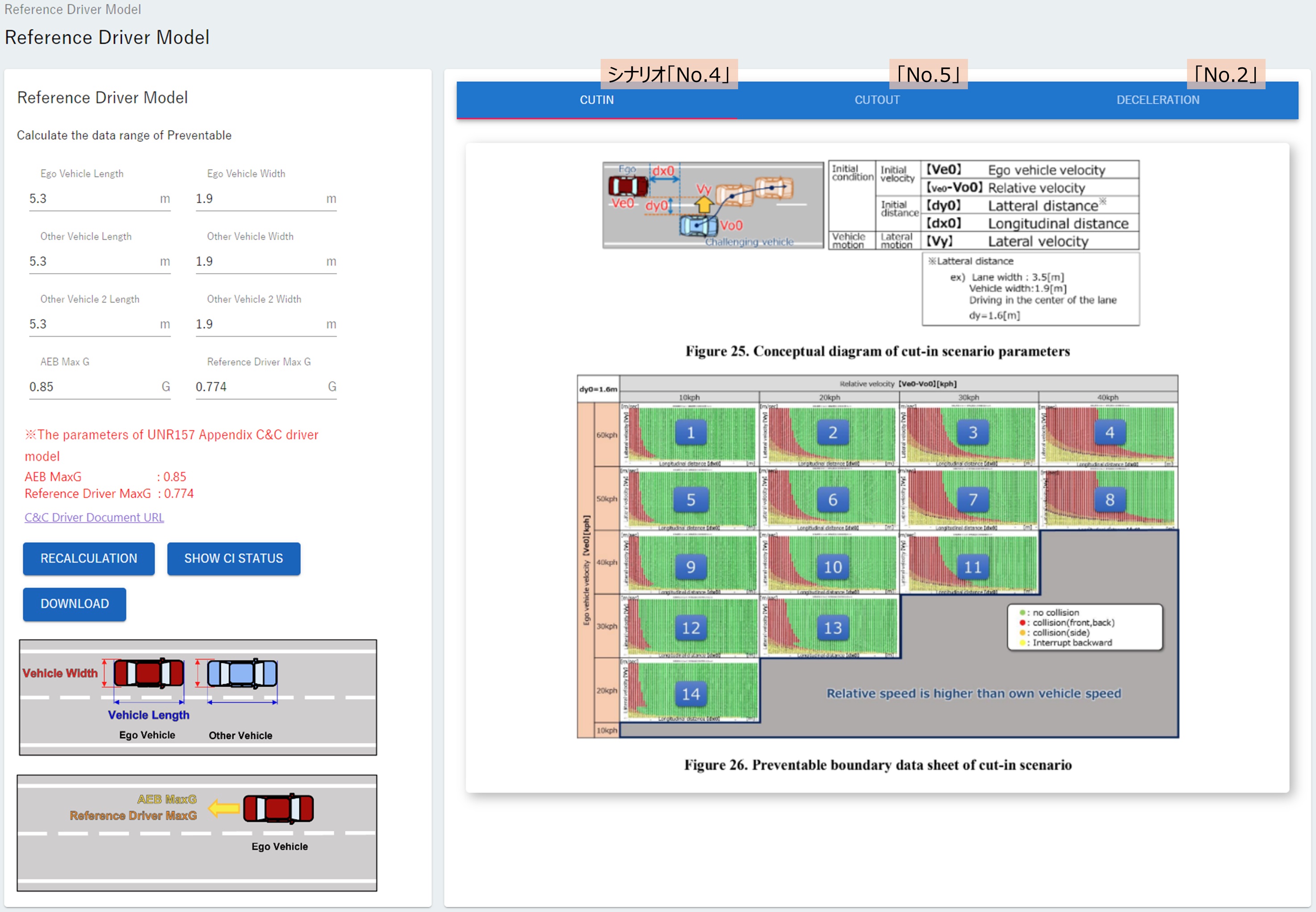
画面右上に選択可能な3つのシナリオ「CUTIN」「CUTOUT」「DECELERATION」の文字が表示されます.選択するシナリオの文字を左クリックします ※.チュートリアルではシナリオ「No.4」(ここで言う「CUTIN」)の場合を説明していますので,「CUTIN」の文字をクリックします.選択されたシナリオの文字の下側に赤いラインが表示されます.
※ シナリオ「No.4」はデフォルトで選択されていますので,何も行わなくても「No.4」が選択された状態となっています.
画面右下に「Preventable boundary data sheet for cut-in scenario」が表示されています.この図に複数表示されているグラフは「回避可能な」範囲/「回避不可能な」範囲を表しています.詳細を説明するため,以下にグラフの一つを示します.
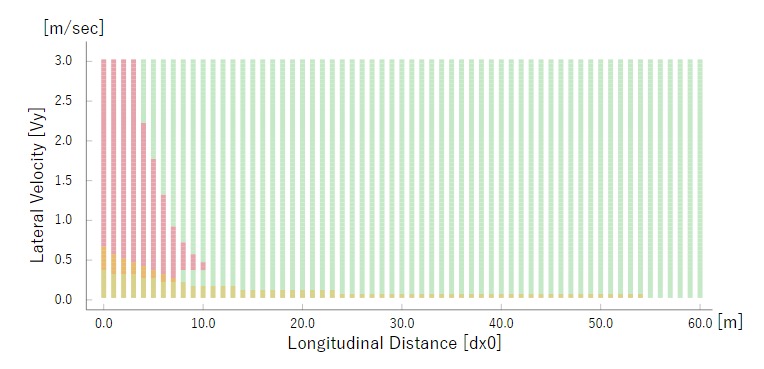
シナリオ「No.4」の「回避可能な」範囲は,\(\frac{\Large 縦軸}{\Large 横軸}\) をそれぞれ \(\frac{\Large V_{y}(他車の最大横速度)}{\Large d_{x0}(自車と他車の車間距離初期値)}\) とする2次元平面上の範囲で表されます.緑色の範囲が「回避可能な」範囲となります.
この範囲は \(V_{e0}\) (自車の速度初期値)と \(V_{e0}-V_{o0}\) (他車を基準とした自車の相対速度初期値)に影響されます.そのため \(V_{e0}\) と \(V_{e0}-V_{o0}\) を所定間隔で複数定義し,それぞれに対し「回避可能な」範囲を示すグラフを作成し,画面に表示しています.
グラフには緑色,ピンク,赤色,橙色,黄色の範囲が表示されます.それらの意味は以下の通りです.
色 |
意味 |
|---|---|
緑 |
非衝突 = 「回避可能な」範囲 |
ピンク |
自車前方の衝突 |
橙 |
自車側方の衝突 |
赤 |
自車後方の衝突 |
黄 |
他車の自車後方への回り込み(参考データ) |
車両の大きさの定義¶
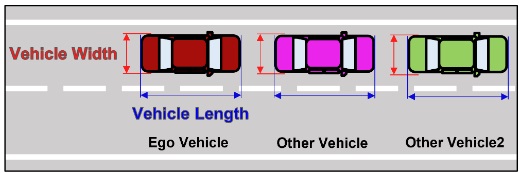
「回避可能な」範囲は車両の大きさ(車体長(Vehicle Length)× 車体幅(Vehicle Width))によっても変化します.車両の大きさはデフォルトで5.3[m]×1.9[m]に定義されています.自車と他車の車体の大きさが異なる場合,それらを別々に定義する必要があります.他車が2台ある場合にはそれらを「Other Vehicle」「Other Vehicle 2」と区別しています.
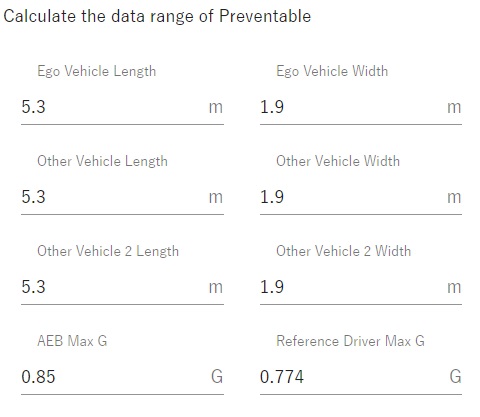
それでは自車(Ego Vehicle)の車体長×車体幅を例えば4.8[m]×1.7[m]としてみましょう.以下のように入力してください.
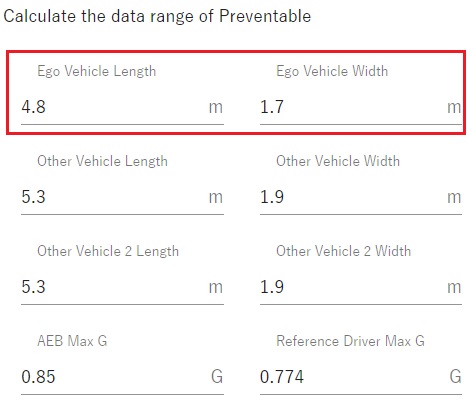
自車の車体長×車体幅が4.8[m]×1.7[m]と定義されました.
調整ができる車両のパラメータは以下の通りです.
パラメータ |
意味 |
|---|---|
Ego Vehicle Lenght |
自車の長さ |
Ego Vehicle Width |
自車の幅 |
Other Vehicle Lenght |
他車の長さ |
Other Vehicle Width |
他車の幅 |
Other Vehicle 2 Lenght |
他車2 ※ の長さ |
Other Vehicle 2 Width |
他車2の幅 |
AEB Max G |
AEB減速度 |
Reference Driving Max G |
Reference Driver減速度 |
※ Other Vehicle2 のパラメータは下図のようにOther Vehicle2が登場するとき以外は調整は反映されません.
回避可能な範囲の計算¶
各パラメータを変更した場合は「RECALCULATION」のボタンを左クリックしてください.
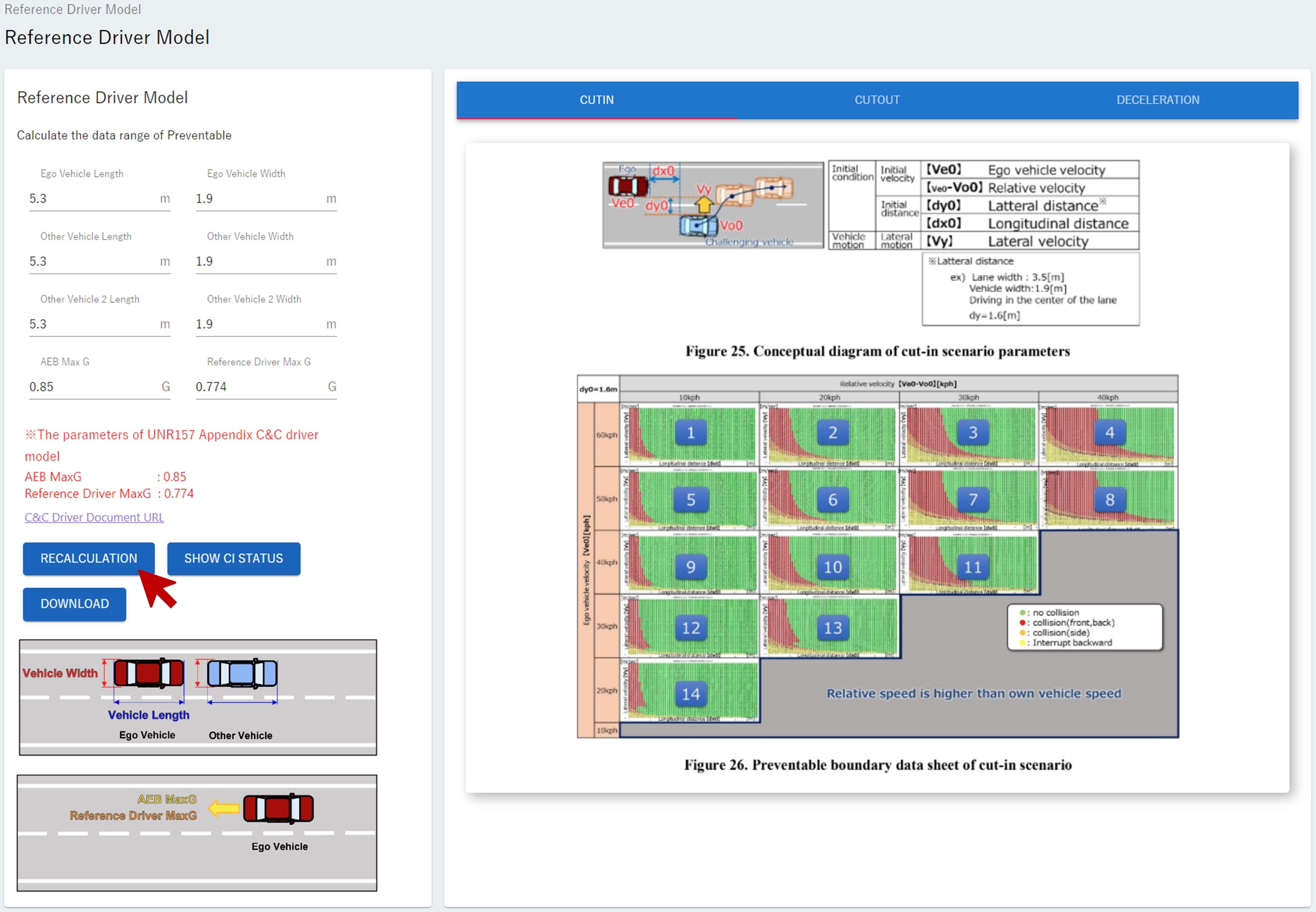
シナリオ「No.4」の「回避可能な」範囲が再計算され,シナリオデータベースに登録されました.計算結果は後に述べる 例2 回避可能な範囲に基づく評価仕様の作成 等で利用されます.