③ 評価仕様の作成¶
「合理的に予見可能な」範囲や「回避可能な」範囲に基づく 評価仕様 の作成手順を説明します.
例1 合理的に予見可能な範囲に基づく評価仕様の作成¶
シナリオ「No.4」を例に採り評価仕様の作成手順を説明します.
「Scenario Database」タブの画面左側,上から4番目のアイコン ※ を左クリックしてください.

※ シナリオデータベースのアイコンの名称/意味 はリファレンスに記載しました.¶
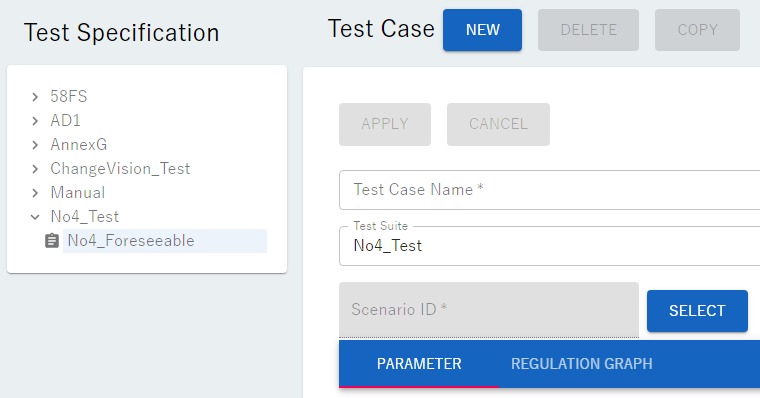
以下の画面が表示されます.
画面内の「SELECT」のボダンを左クリックすると以下の画面が表示されます.
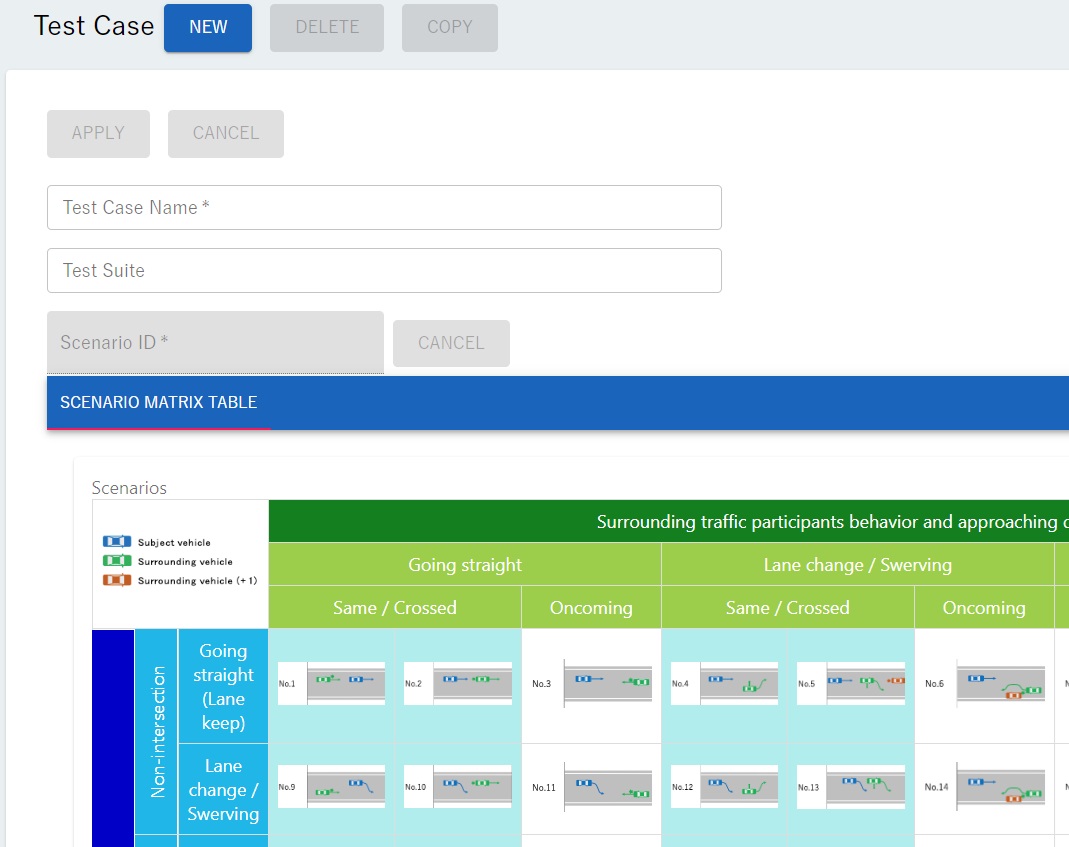
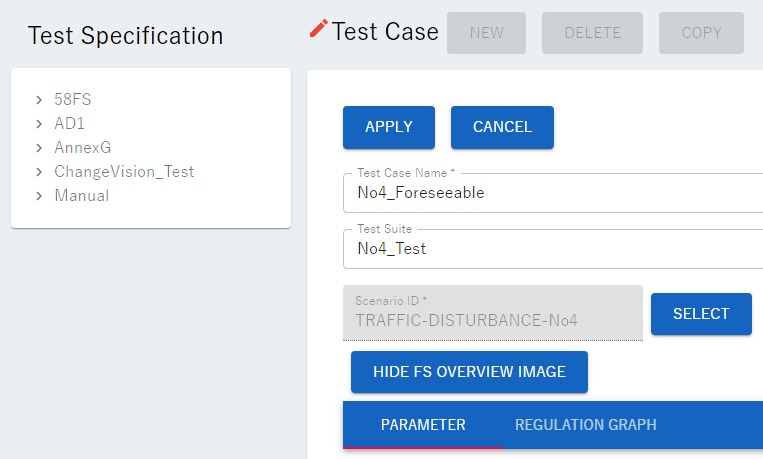
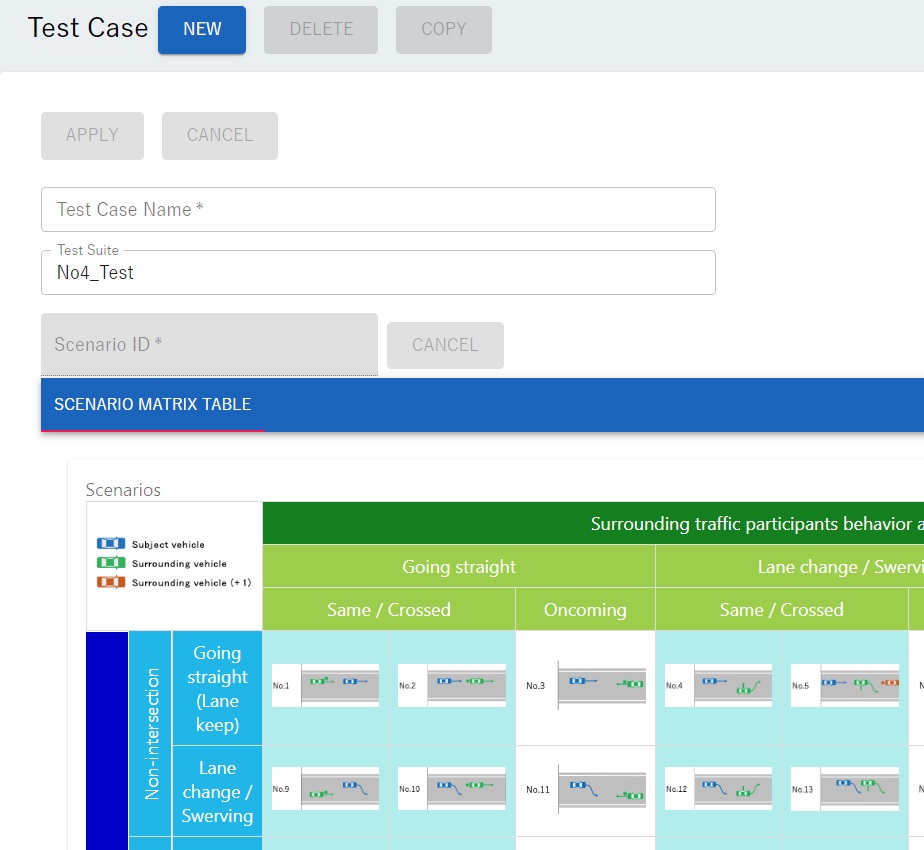
「SCENARIO MATRIX TABLE」に58シナリオが表示されています.「No.4」シナリオが表示されているセルを左クリックしてください.以下の画面が表示されます.
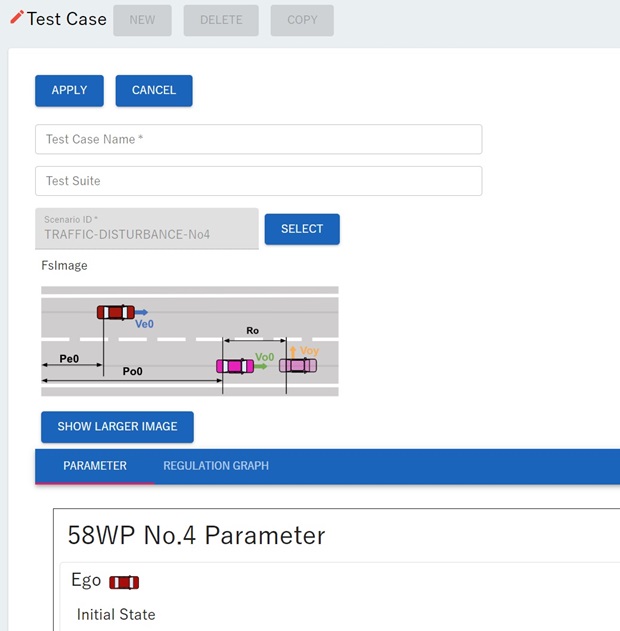
「PARAMETER」と「REGULATION GRAPH」のボタンがあります.これらは評価仕様を設定するために用意された2つの方法を表しており,いずれか一方を左クリックします.クリックするとそのボタンの下に赤色のアンダーラインが表示されます.「合理的に予見可能な範囲」に基づく評価仕様の作成時は「PARAMETER」ボタンを左クリックします.(デフォルトでは「PARAMETER」ボタンが左クリックされた状態となっております.)
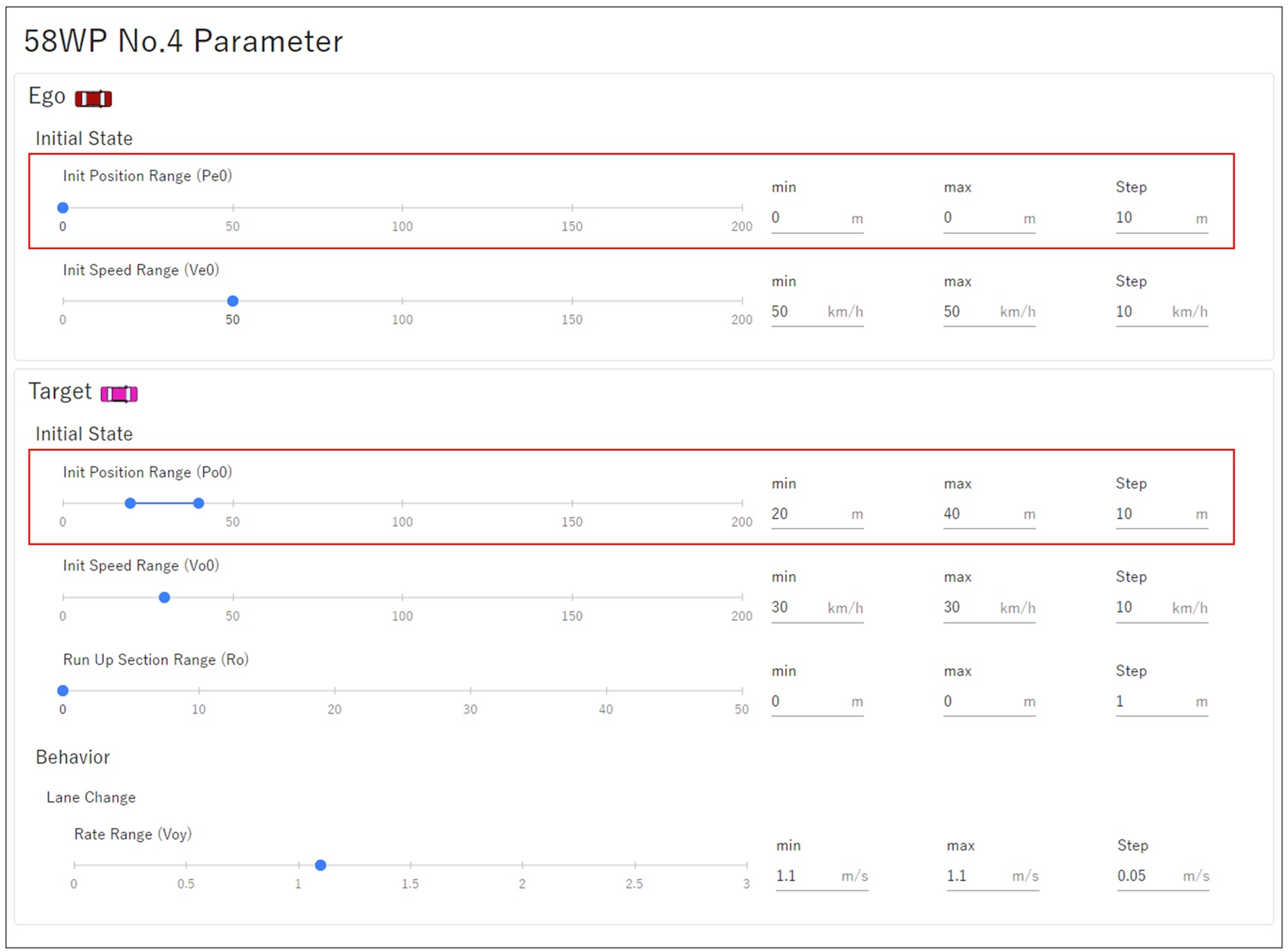
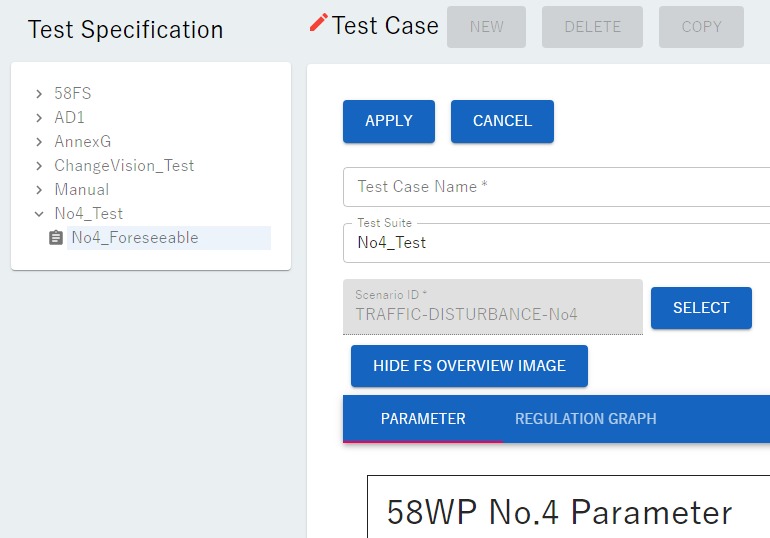
以下に改めて「58WP No.4 Parameter」を示します.
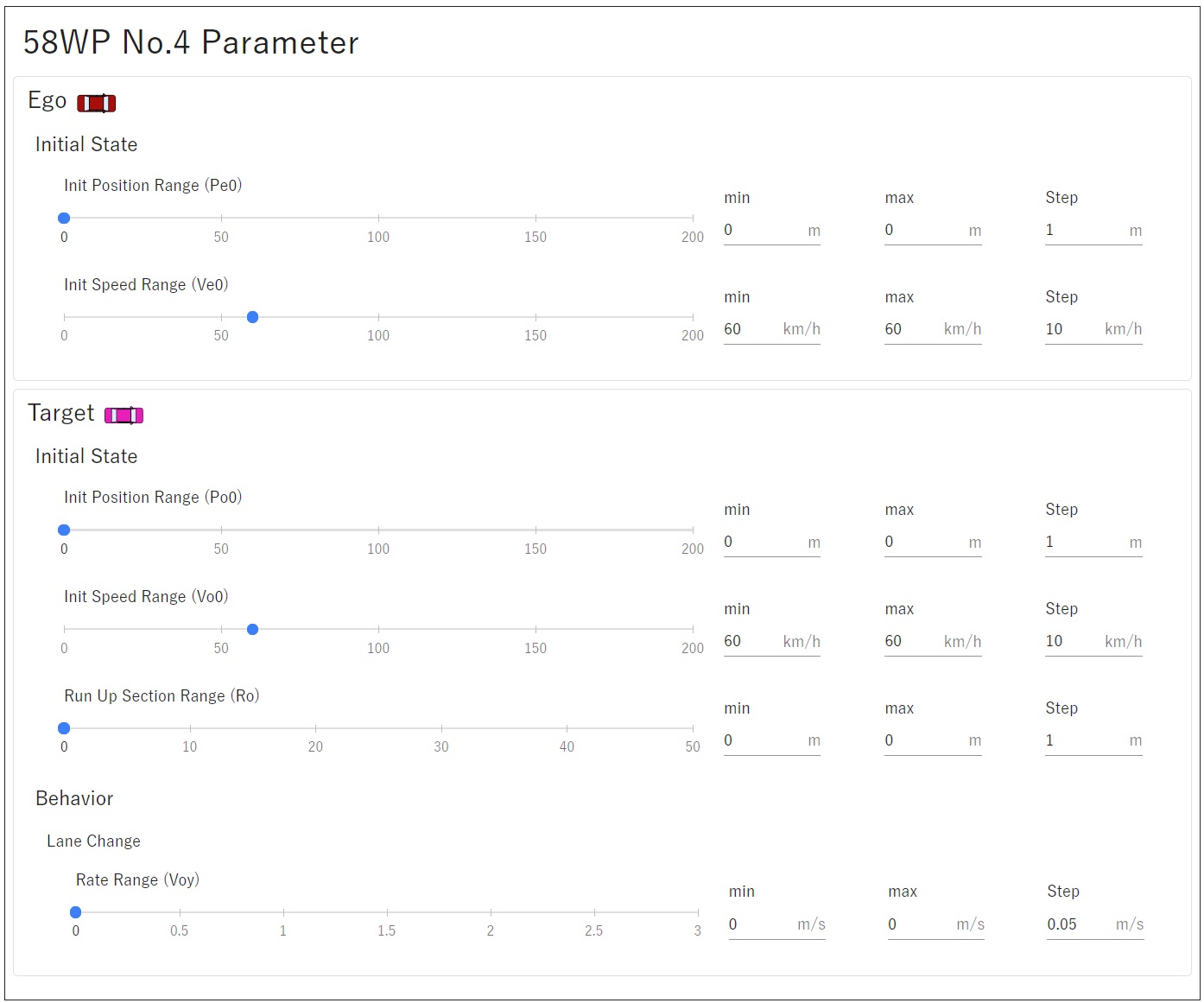
「Ego」(自車)と「Target」(他車)の初期状態,および「Behavior」(振る舞い:車線変更時の横速度)に対して最小値/最大値/間隔を設定します.
① 合理的に予見可能な範囲の定義 では,局所的な範囲の一例として以下の範囲を定義しました.
パラメータ |
範囲 |
|---|---|
\(V_{e0}\) |
35.25~64.76[km/h] |
\(V_{o0}\) |
16.31~52.50[km/h] |
\(V_{e0}-V_{o0}\) |
5.47~25.73[km/h] |
\(d_{x0}\) |
9.52~60.14[m] |
\(V_{y}\) |
0.28~ 1.71[m/s] |
補足)「合理的に予見可能な」範囲を定義した後に「Surrounding Traffic Disturbance」タブを閉じていないのであれば,定義した範囲はそのタブから参照することができます.
自動運転の評価仕様として「合理的に予見可能な範囲」を包含するようにパラメータの範囲を設定します.ただし本マニュアルではシナリオデータベースの機能を判りやすく説明することを目的として,範囲を限定した以下の例を示します.
項目 |
意味 |
最小値Min |
最大値Max |
間隔 Step |
補足 |
|---|---|---|---|---|---|
Init Position Range ( \(P_{e0}\) ) |
自車初期位置範囲 |
0[m] |
0[m] |
10[m] |
無し |
Init Speed Range( \(V_{e0}\) ) |
自車速度初期値範囲 |
50[km/h] |
50[km/h] |
10[km/h] |
無し |
Init Position Range ( \(P_{o0}\) ) |
他車初期位置範囲 |
20[m] |
40[m] |
10[m] |
無し |
Init Speed Range( \(V_{o0}\) ) |
他車速度初期値範囲 |
30[km/h] |
30[km/h] |
10[km/h] |
無し |
Run Up Section Range ( \(R_{0}\) ) |
助走区間長範囲 |
0[m] |
0[m] |
1[m] |
今回設定しません |
Rate Range( \(V_{oy}\) ) |
他車横速度範囲 |
1.1[m/s] |
1.1[m/s] |
0.05[m/s] |
無し |
上記パラメータを設定した画面を以下に示します.\(V_{e0}-V_{o0}\) は \(V_{e0}\) と \(V_{o0}\) の設定で決まるため,評価仕様の作成ではその項目は存在しません.
また,FY23版の設定項目にあった進行方向車間距離初期値範囲(\(d_{x0}\))はFY24版からは設定項目からなくなり、代わりに 初期位置の範囲 として自車 \(P_{e0}\) と他車 \(P_{o0}\) のパラメータを設定できるようになりました.
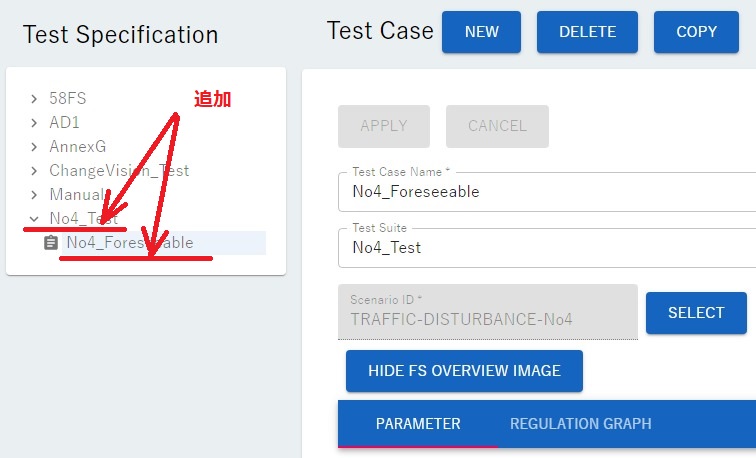
以下のように評価仕様名(Test Case Name)に「No4_Foreseeable」を,格納するフォルダ名(Test Suite)に「No4_Test」を入力します.
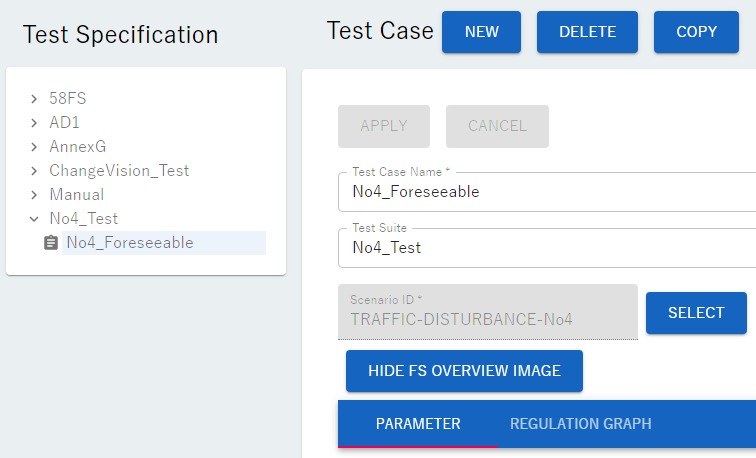
最後に「APPLY」ボタンを左クリックします.評価仕様「No4_Foreseeable」が以下に示すように登録されました.
この評価仕様は合計3つの評価シナリオを定義しています.各評価シナリオの定義する変数を以下の表にまとめました ※.
※ シナリオデータベースは各シナリオに1から始まる番号を割り当てます.その番号を本マニュアルでは評価シナリオ番号と呼ぶことにします.評価シナリオ番号は評価シナリオ毎に作成されるOpenScenarioファイルの名称の最後に現れます.このOpenScenarioファイルは ④ 評価シナリオファイルの作成/ダウンロード で説明します.
評価シナリオ番号 |
1 |
2 |
3 |
\(V_{e0}\) [km/h] |
50 |
50 |
50 |
\(V_{o0}\) [km/h] |
30 |
30 |
30 |
\(d_{x0}\) [m] |
20 |
30 |
40 |
\(V_{y}\) [m/s] |
1.1 |
1.1 |
1.1 |
例2 回避可能な範囲に基づく評価仕様の作成¶
シナリオ「No.4」を例に採り評価仕様の作成手順を説明します.評価仕様「No4_foreseeable」が登録された以下の画面において,「NEW」のボタンを左クリックします.
以下の画面が表示されます.
「SELECT」のボダンを左クリックすると以下の画面が表示されます.
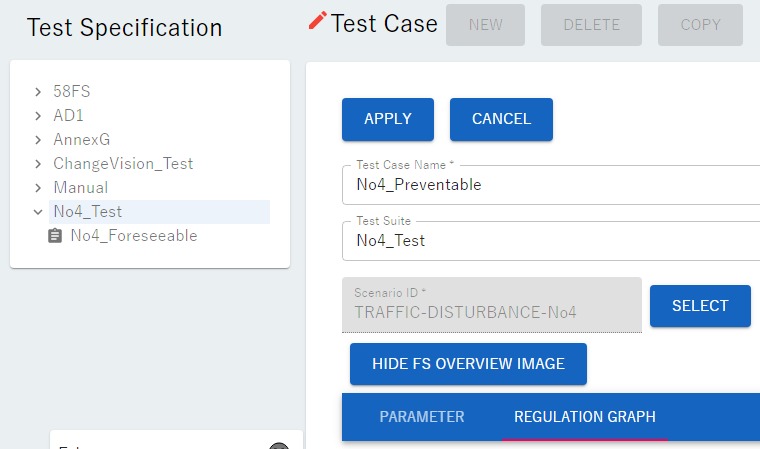
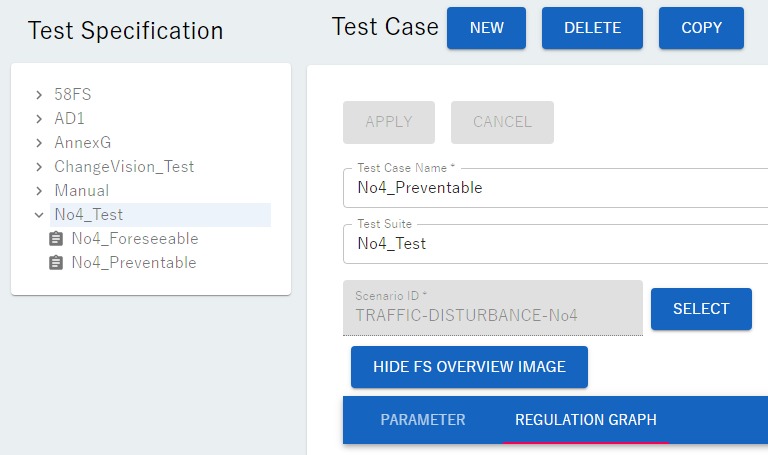
「SCENARIO MATRIX TABLE」に58シナリオが表示されています.「No.4」シナリオが表示されているセルを左クリックすると以下の画面が表示されます.
「REGULATION GRAPH」の文字を左クリックすると以下の画面が表示されます.
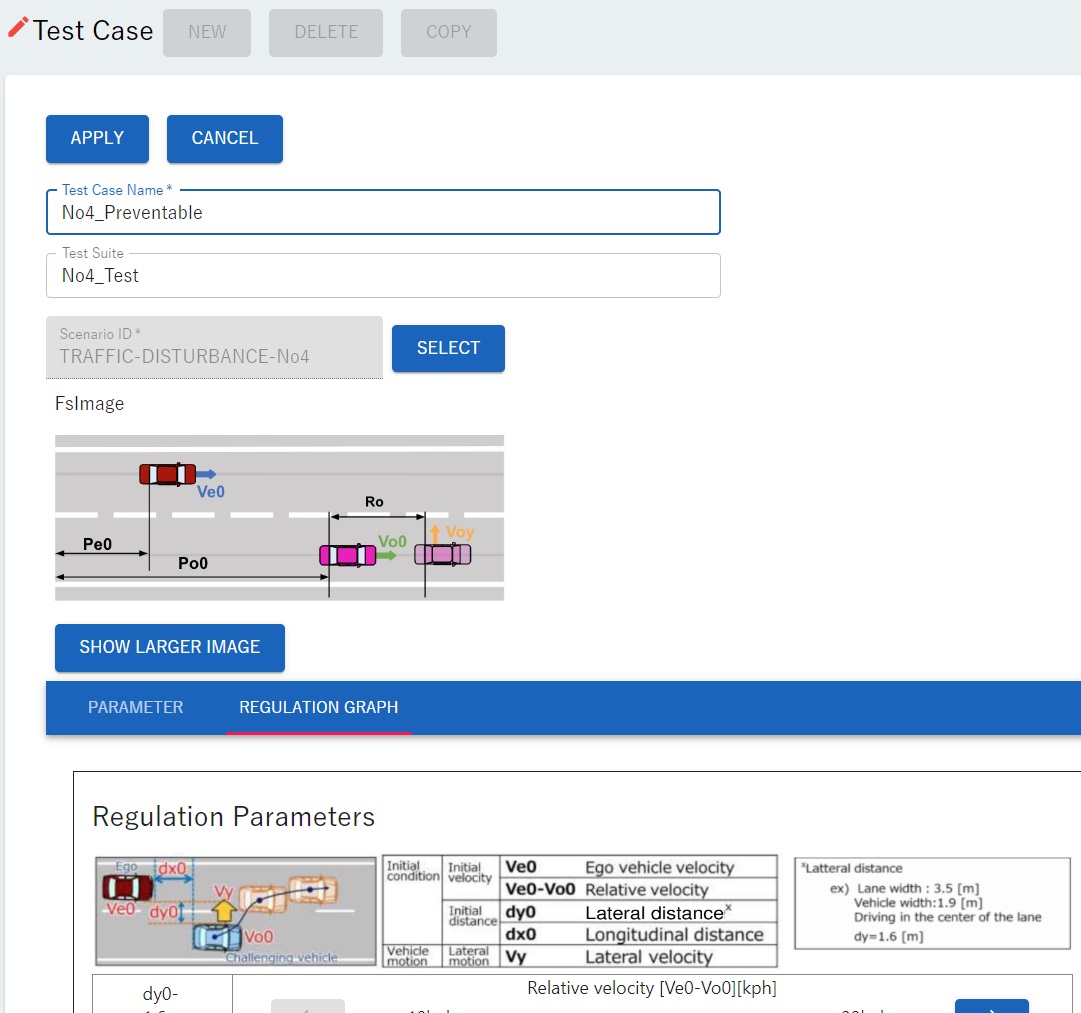
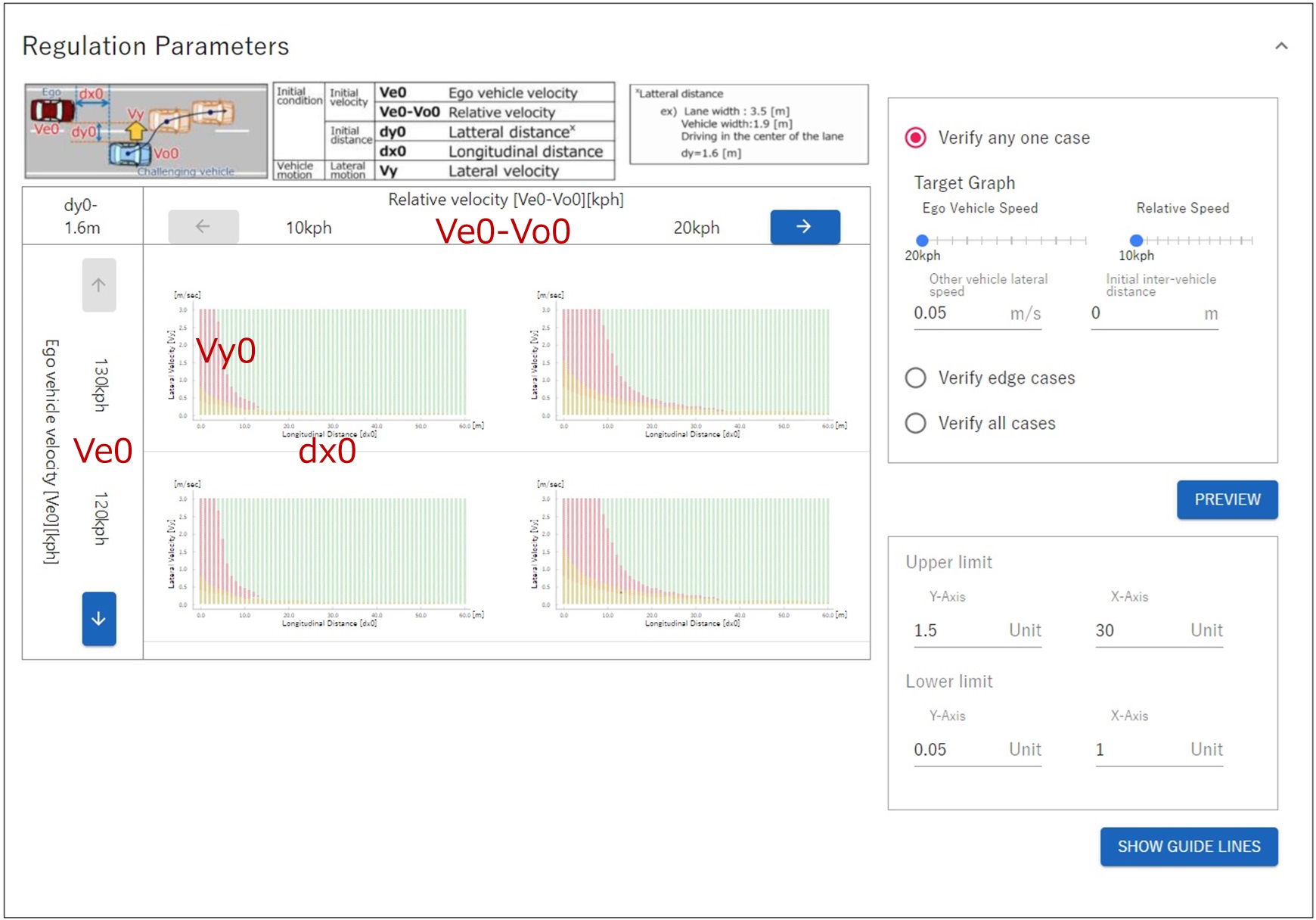
「Regulation Parameters」の部分を以下に示します.画面左下に「回避可能な」範囲(緑色の範囲) ※ /「回避不可能な」範囲(緑色以外の範囲)を表すグラフが4つ表示されています.また,画面右側に評価仕様を定義する3つの選択肢「Verify any one case」「Verify edge case」「Verify all cases」が表示されています.
※この範囲は \(V_{e0}\) (自車の速度初期値)と \(V_{e0}-V_{o0}\) (他車を基準とした自車の相対速度初期値)に影響されます.そのため \(V_{e0}\) と \(V_{e0}-V_{o0}\) を所定間隔で複数定義し,それぞれに対し「回避可能な」範囲/「回避不可能な」範囲を表すグラフを作成し,画面に表示しています.
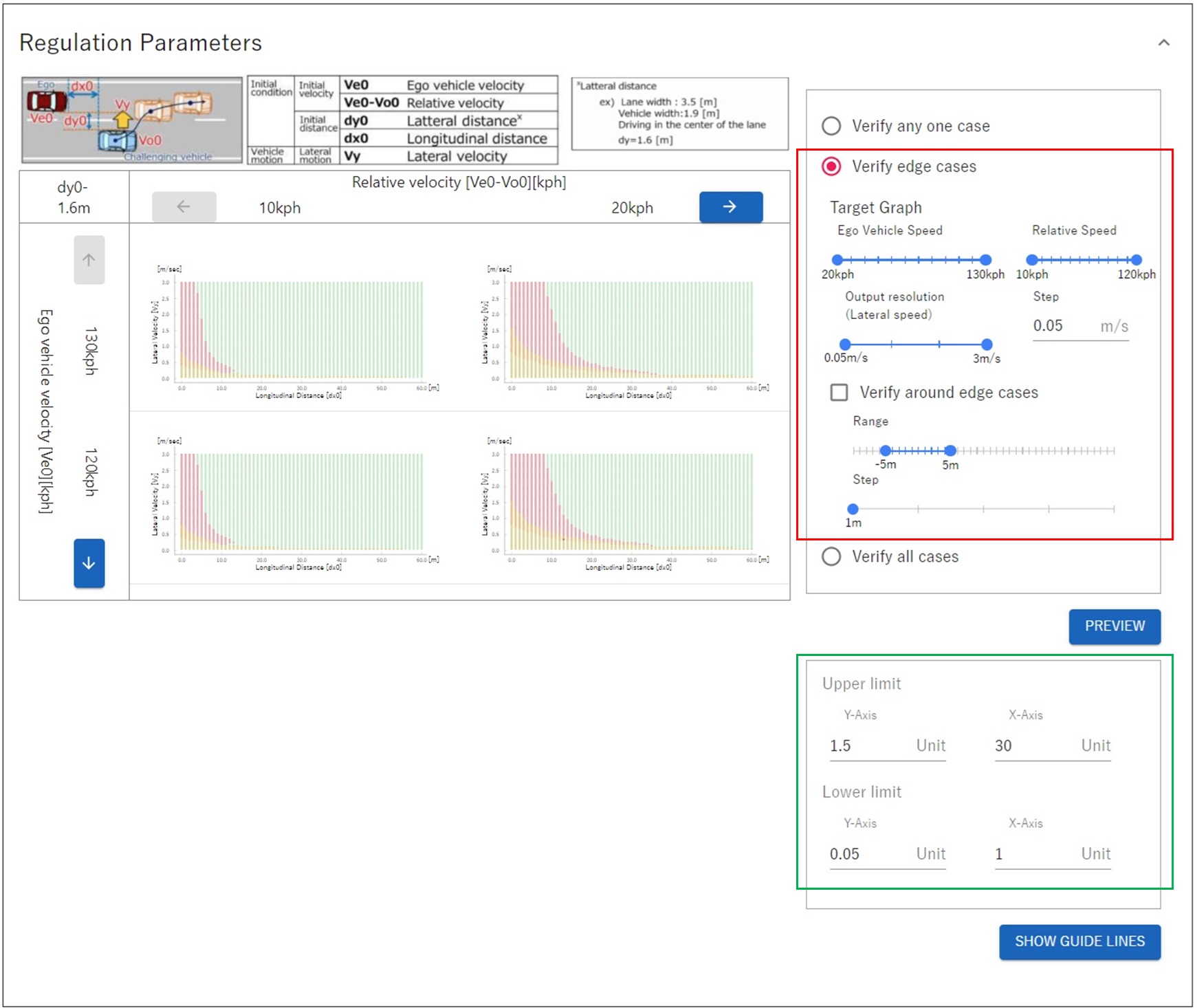
画面に表示される「Verify edge case」の〇印を左クリックしてください.(赤色の丸印となります)「Verify edge case」では「回避可能な」範囲のedge,すなわち「回避可能な」範囲と「回避不可能な」範囲の境界線付近に評価シナリオを定義します.
次にテストを実施する範囲を示すガイド線をグラフ上に表示させます.
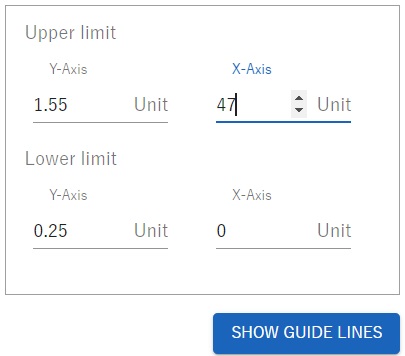
上図の右下に表示している「Upper limmit/Lower limit」指定エリア(緑枠部)にテストの範囲となるX軸,Y軸のそれぞれの上限値,下限値を入力します. ここで入力する値は 確率分布を用いた「合理的に予見可能」な範囲の定義 で出力した値のうち \(d_{x0}\) (X軸)と \(V_{y}\) (Y軸)を使用します.
パラメータ |
範囲 |
|---|---|
\(d_{x0}\) |
0.00~46.66[m] |
\(V_{y}\) |
0.28~1.53[m/s] |
入力する際は値の直接入力ではなく▲▼を使って値を調整してください.
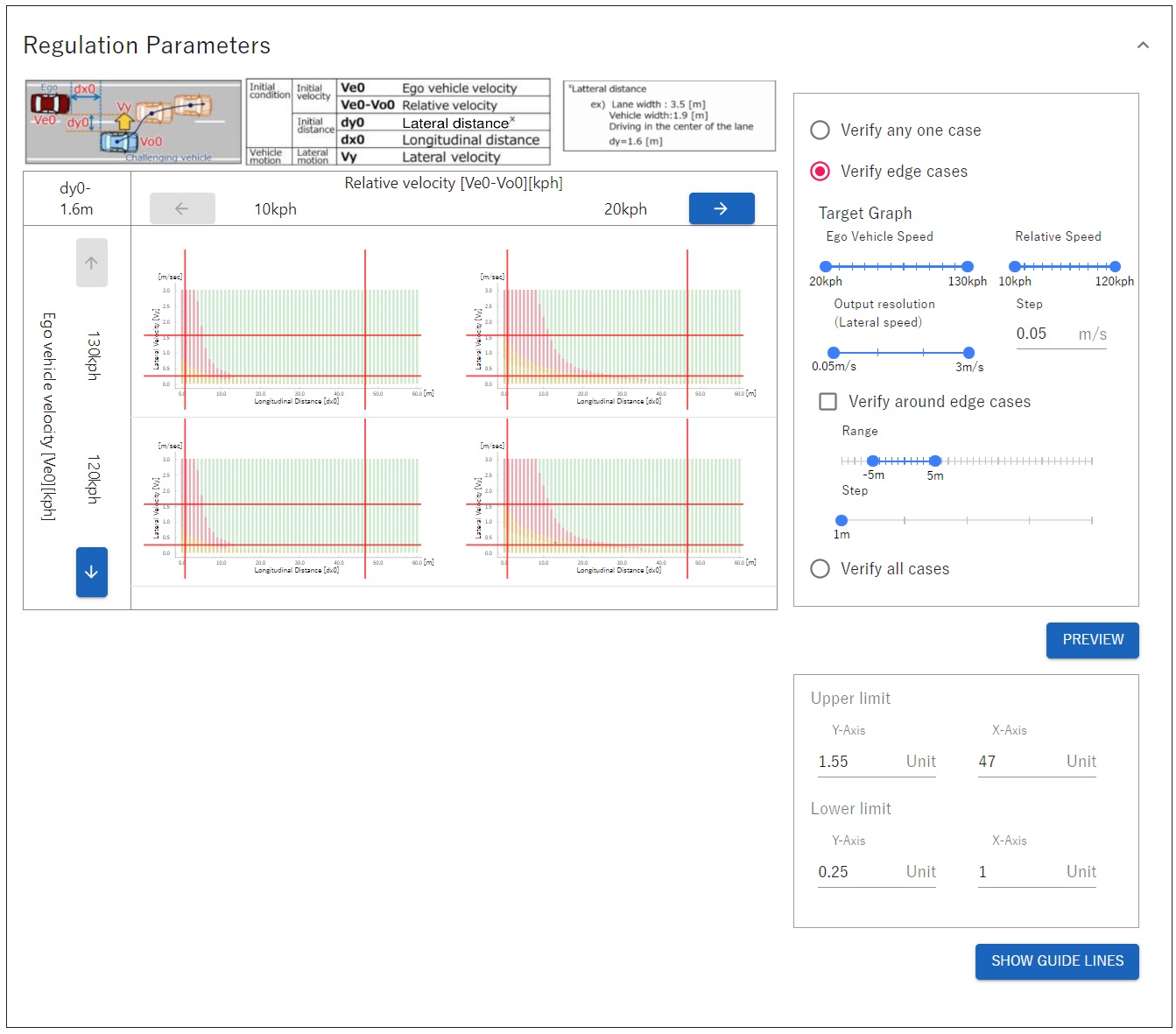
「SHOW GUIDE LINES」を左クリックするとガイドラインが表示されます.
次のステップとして,以下に示す2つのパラメータの範囲を設定します.
パラメータ |
画面での表記 |
意味 |
|---|---|---|
\(V_{e0}\) |
Ego Vehicle Speed |
自車=自動運転車両の速度初期値 |
\(V_{e0}-V_{o0}\) |
Relative Speed |
他車を基準とした自車の相対速度初期値 |
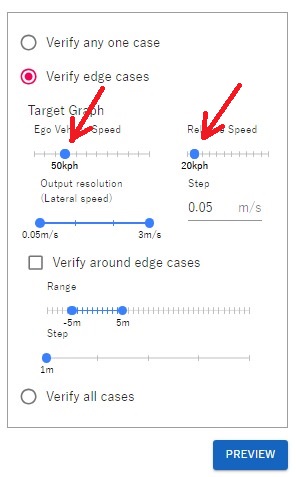
画面右側に表示されている「Target Graph」の下,「Ego Vehicle Speed」と「Relative Speed」のスライダー(2つの青丸印)を左右にずらし,それらの範囲が評価したい内容に応じて調節してください.以下に一例を示します.評価仕様の \(V_{e0}\) は 50[km/h],\(V_{e0}-V_{o0}\) は 20 [km/h] となります.今回,\(V_{e0}\) と \(V_{e0}-V_{o0}\) はそれぞれ1点としましたが,範囲で指定することも可能です.
パラメータ |
画面での表記 |
スライダーによる範囲指定 |
|---|---|---|
\(V_{e0}\) |
Ego Vehicle Speed |
50~50 |
\(V_{e0}-V_{o0}\) |
Relative Speed |
20~20 |
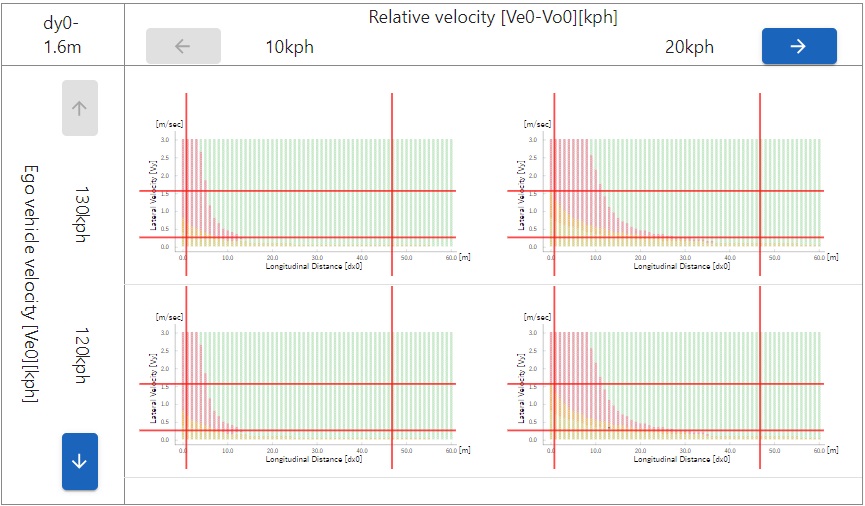
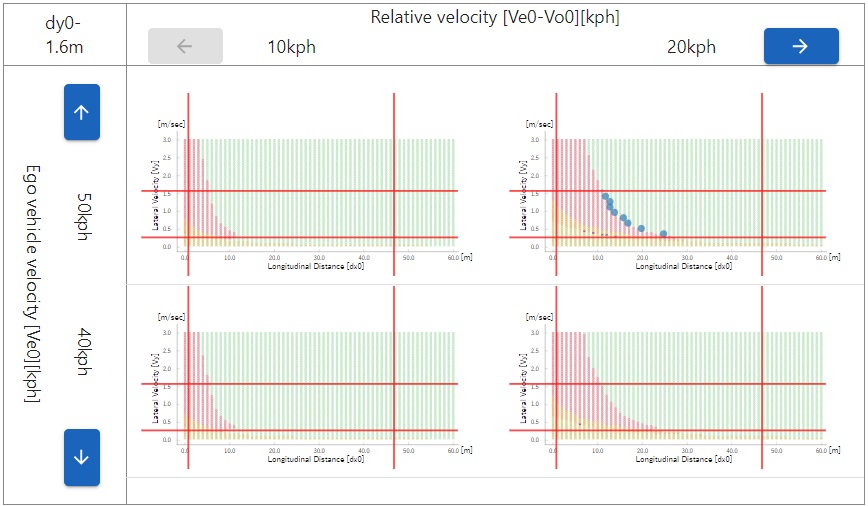
「PREVIEW」ボタンを左クリックしてください.この操作により,評価シナリオの \([V_{e0}-V_{o0}\), \(V_{e0}]\) が回避可能な範囲(緑色の範囲)/不可能な範囲(緑以外の範囲)を表すグラフに重畳表示されます.ただし,デフォルトの設定では,上側の2つのグラフの \(V_{e0}\) は 130kph( = 130 [km/h]),下側の2つのグラフの \(V_{e0}\) は 120kph( = 120 [km/h])となっているため,表示を切り替える必要があります.
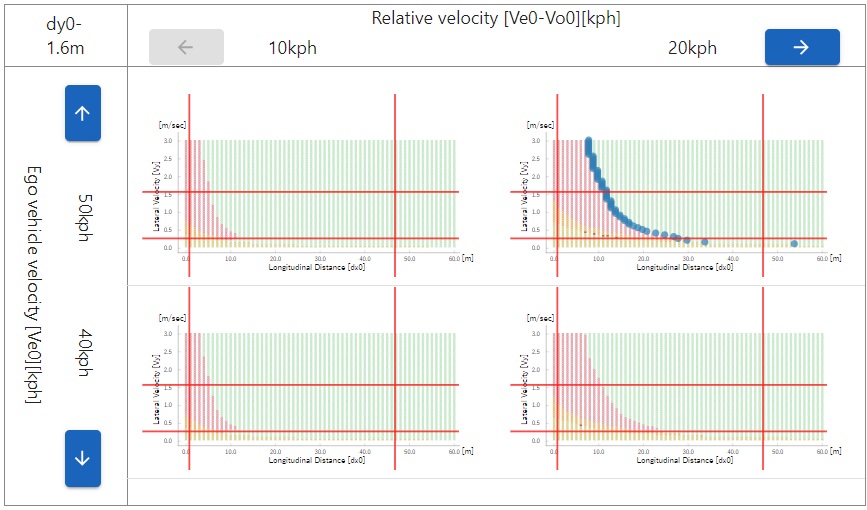
上側の \(V_{e0}\) が 50 [km/h] となるように画面左下の下向き矢印ボタンを数回左クリックしてください.下向き矢印ボタンと上向き矢印ボタンで \(V_{e0}\) の表示範囲が切り替わります ※ .以下のように,グラフ上に評価シナリオの \([V_{e0}-V_{o0}\), \(V_{e0}]\) を表す複数の点(青色の点)が確認できます.
※同様に左向き矢印ボタンと右向き矢印ボタンで \(V_{e0}-V_{o0}\) の表示範囲が切り替わります.
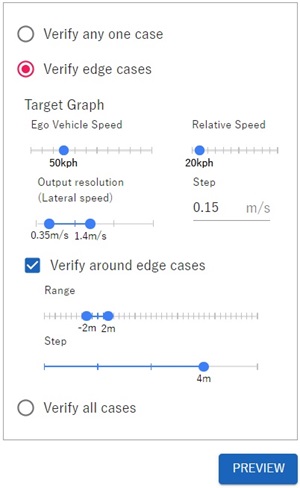
次のステップとして,\(V_{y}\) の範囲並びに分解能(=評価シナリオを定義する間隔)を設定します.本チュートリアルではガイド線内に収まるように以下のように設定します.
設定対象 |
設定値 [m/s] |
|---|---|
範囲 |
0.35~1.4 |
分解能 |
0.15 |
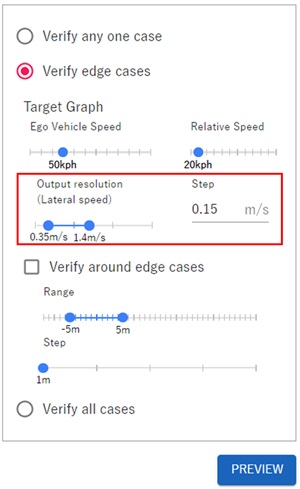
「PREVIEW」ボタンを左クリックください.以下に示すように評価仕様のシナリオ数が変更されたことが判ります.(合計8個のシナリオが定義されています.それは \(V_{y}\) の範囲・分解能に一致しています.)
最後のステップとして,境界線上からオフセットさせた評価シナリオを設定する方法を説明します.以下に示すように画面右側の設定を修正してください.この設定により,境界線上に設定された評価シナリオに対して \(d_{x0}\) に関して±2[m]だけオフセットした評価シナリオが定義されます.
「PREVIEW」ボタンを左クリックすると以下の画面が表示されます.
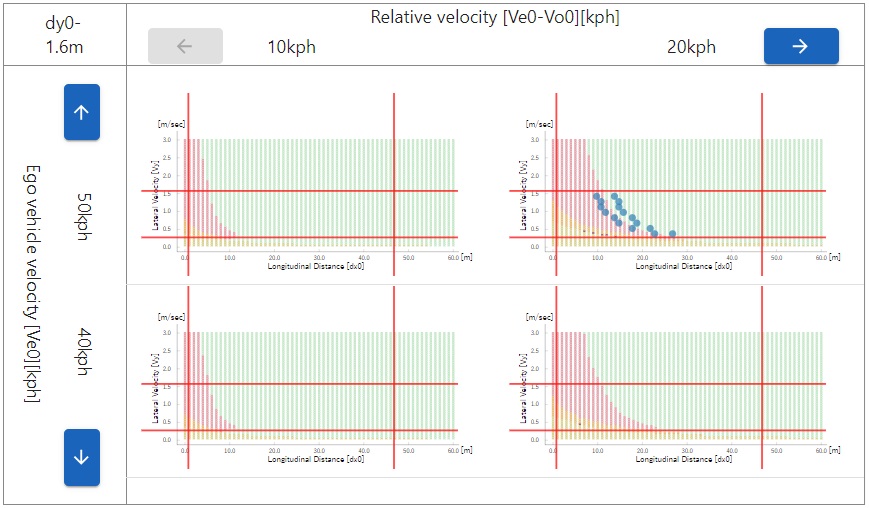
境界線付近に合計16個の評価シナリオが定義されました.
以下のように評価仕様名(Test Case Name)に「No4_Preventable」を入力します.
最後に「APPLY」ボタンを左クリックします.16個の評価シナリオを定義した評価仕様「No4_preventable」が以下に示すように登録されました.
この評価仕様は合計16の評価シナリオを定義しています.各評価シナリオの定義する変数を以下の表にまとめました.
評価シナリオ番号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
\(V_{e0}\) [km/h] |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
\(V_{o0}\) [km/h] |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
30 |
\(d_{x0}\) [m] |
23 |
27 |
18 |
22 |
15 |
19 |
14 |
18 |
12 |
16 |
11 |
15 |
11 |
15 |
10 |
14 |
\(V_{y}\) [m/s] |
0.35 |
0.35 |
0.5 |
0.5 |
0.65 |
0.65 |
0.8 |
0.8 |
0.95 |
0.95 |
1.1 |
1.1 |
1.25 |
1.25 |
1.4 |
1.4 |