⑥ シミュレーション結果の可視化¶
⑤ 評価シナリオのシミュレーション実行 で説明したjsonファイルにおいて,評価シナリオが複数の場合,衝突回避(PASS)/衝突(FAIL)の割合を円グラフで可視化することができます.また,評価シナリオを定義する評価仕様が「回避可能な」範囲に基づいて作成された場合,シミュレーション結果を「回避可能な」範囲/「回避不可能な」範囲の図に重畳させて表示することができます.本章ではそのための手順を説明します.
例1 評価仕様「No4_Foreseeable)のシミュレーション結果の可視化¶
画面左側にある上から6番目のアイコン ※ を左クリックしてください.

※ シナリオデータベースのアイコンの名称/意味 はリファレンスに記載しました.
以下の画面が表示されます.
「TestPlan」を選択ボタンを左クリックして「No4_Foreseeable_Test」を選択してください.以下の画面となります.
「IMPORT SIM RESULT」ボタンをクリックして, ⑤ 評価シナリオのシミュレーション実行 で作成したjsonファイル(本チュートリアルの例では43e11c28_sim_result.json)を指定してください.以下の画面となります.
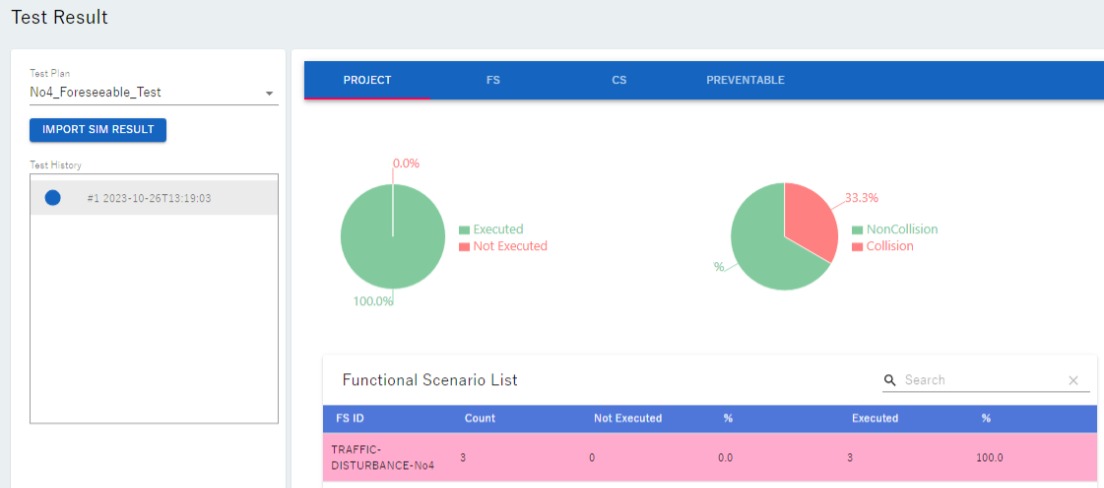
2つの円グラフが表示されています.左側の円グラフはシミュレーションが実行できた割合を表しています.今回のケースでは3件とも結果をjsonファイルに記載しており,すべて実行できたということになっています.
右側の円グラフは評価したシナリオの衝突/衝突回避の割合を表しています.今回, ⑤ 評価シナリオのシミュレーション実行 で述べたように評価シナリオ番号 1 のシナリオのみ衝突(FAIL)としましたので,それに符合する内容が表示されています.
評価結果に衝突(FAIL)がある場合はFunctional Scenario Listが薄ピンク色で表示されます.
例2 評価仕様「No4_Preventable)のシミュレーション結果の可視化¶
「TestPlan」を選択ボタンを左クリックして「No4_Preventable_Test」を選択してください.以下の画面となります.
「IMPORT SIM RESULT」ボタンをクリックして, ⑤ 評価シナリオのシミュレーション実行 で作成したjsonファイル(本チュートリアルの例では7a1532f9_sim_result.json)を指定してください.以下の画面となります.
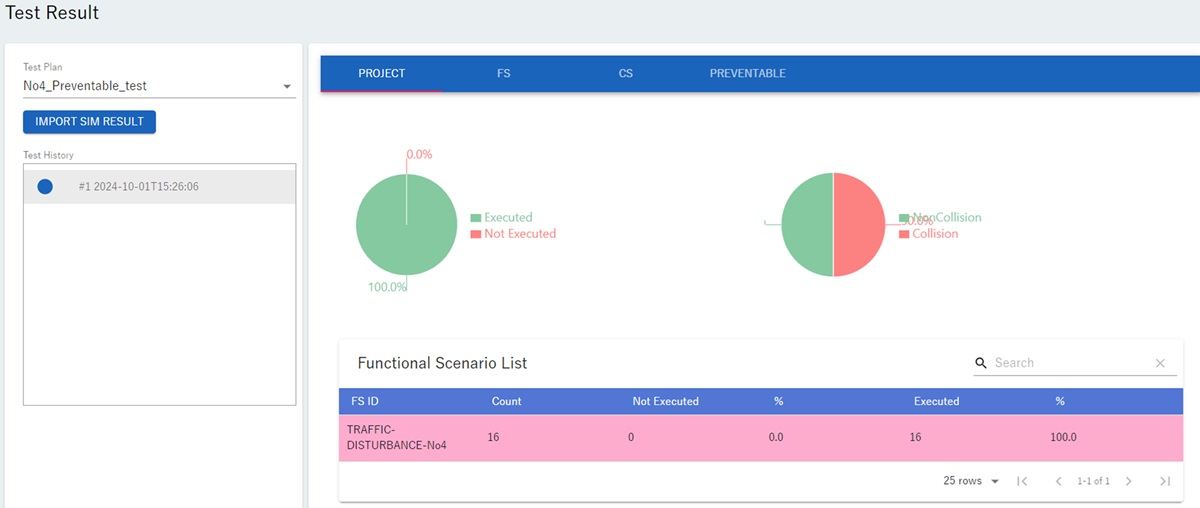
2つの円グラフが表示されています.左側の円グラフはシミュレーションが実行できた割合を表しています.今回のケースでは16件とも結果をjsonファイルに記載しており,すべて実行できたということになっています.
右側の円グラフは評価したシナリオの衝突/衝突回避の割合を表しています.今回, ⑤ 評価シナリオのシミュレーション実行 で述べたように評価シナリオ番号が奇数のシナリオを衝突(FAIL)としましたが,それに符合する内容(50[%] が衝突)が表示されています.
画面に表示されている「PREVENTABLE」ボタンを左クリックしてください.以下の画面が表示されます.
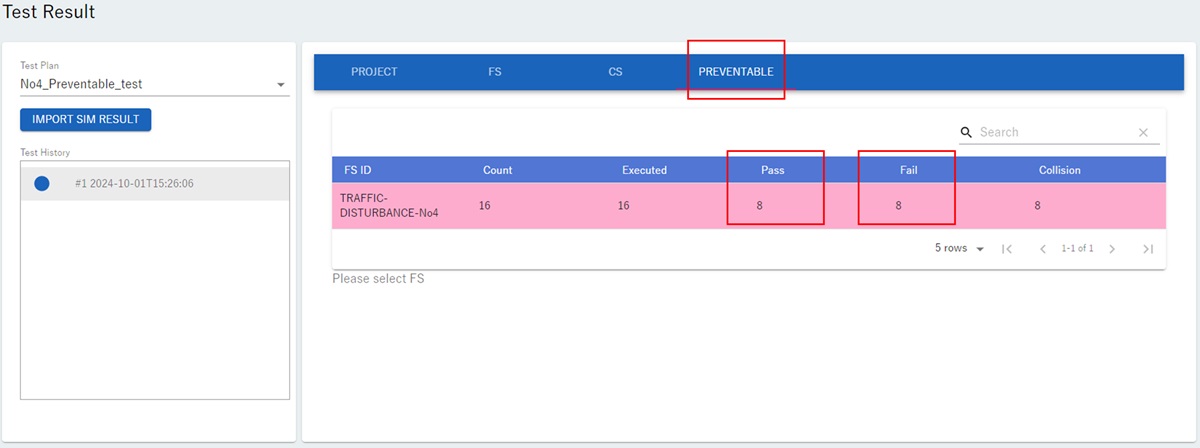
画面上の「Pass」「Fail」は衝突回避/衝突を表しています.
本マニュアルでは ⑤ 評価シナリオのシミュレーション実行 で示した通り,16の評価シナリオのシミュレーション結果(衝突回避/衝突)を回避可能/不可能に一致させるように設定しましたが,それに符合する内容(「Pass」8,「Fail」8)が表示されています.
以下に示す「TRAFFIC-DISTURBANCE-No4」ボタンを左クリックしてください.
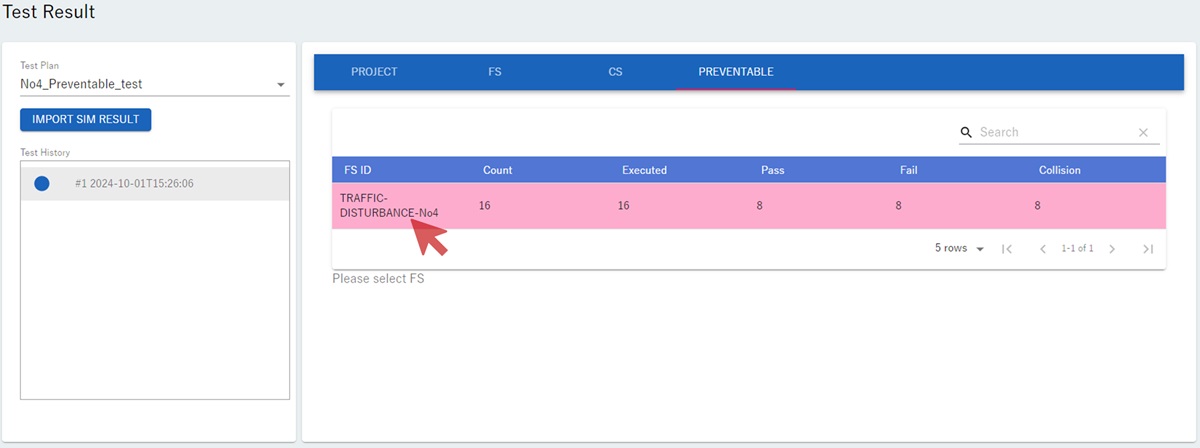
以下に示す画面が表示されます.

シナリオ「No.4」の「回避可能な」範囲は,縦軸/横軸をそれぞれ \(V_{y}\) (他車の最大横速度)/ \(d_{x0}\) (自車と他車の車間距離初期値)とする2次元平面上の範囲で表されます.緑色の範囲が「回避可能な」範囲となります.
この範囲は \(V_{e0}\) (自車の速度初期値)と \(V_{e0}\) -\(V_{o0}\) (他車を基準とした自車の相対速度初期値)に影響されます.そのため \(V_{e0}\) と \(V_{e0}\) -\(V_{o0}\) を所定間隔で複数定義し,それぞれに対し「回避可能な」範囲を示すグラフを作成し,画面に表示しています.
グラフには緑色,ピンク,橙色,赤,黄色の範囲が表示されます.それらの意味は以下の通りです.
色 |
意味 |
|---|---|
緑 |
非衝突 = 「回避可能な」範囲 |
ピンク |
自車前方の衝突 |
橙 |
自車側方の衝突 |
赤 |
自車後方の衝突 |
黄 |
他車の自車後方への回り込み(参考データ) |
評価仕様に合わせて \(V_{e0}\) が50[km/h], \(V_{e0}\) -\(V_{o0}\) が20[km/h]であるグラフが表示されるよう,画面内の下向き矢印ボタンと右向き矢印ボタンを左クリックしてください ※.
※ 操作中に上向き矢印ボタンや左向き矢印ボタンも利用できるようになります.それら4つのボタンを用いて表示を調節します.
調節した結果を以下に示します.
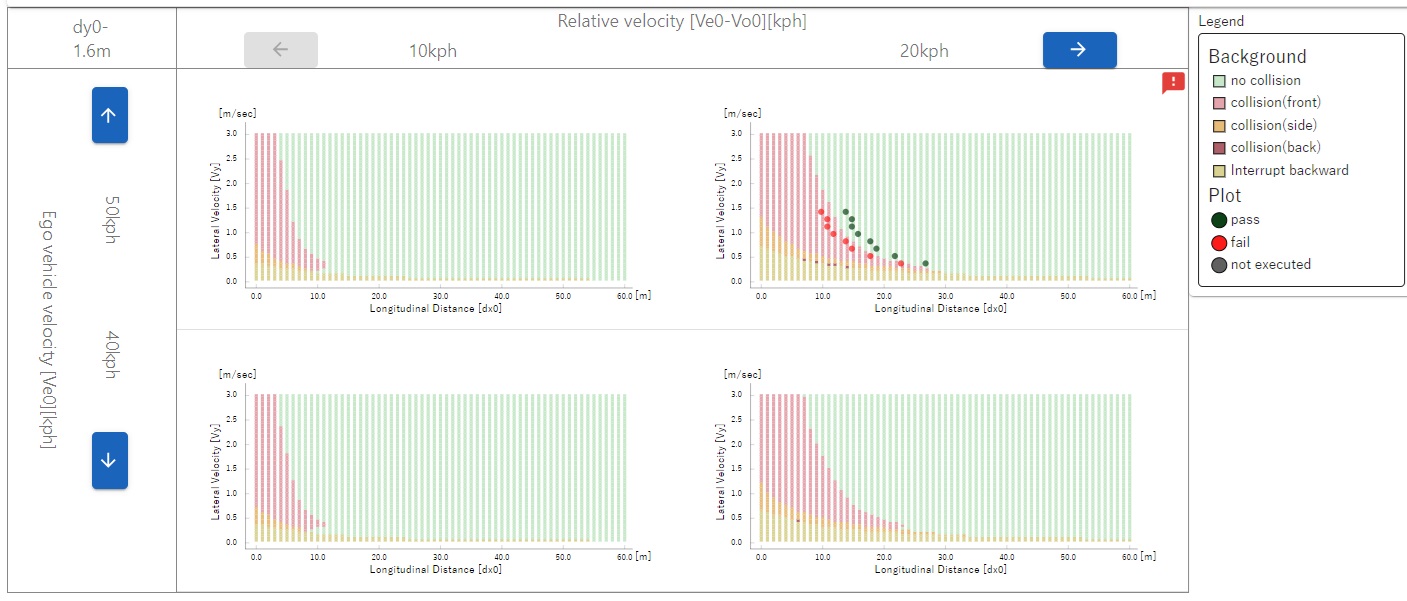
上記画面の一部を拡大したものを以下に示します.
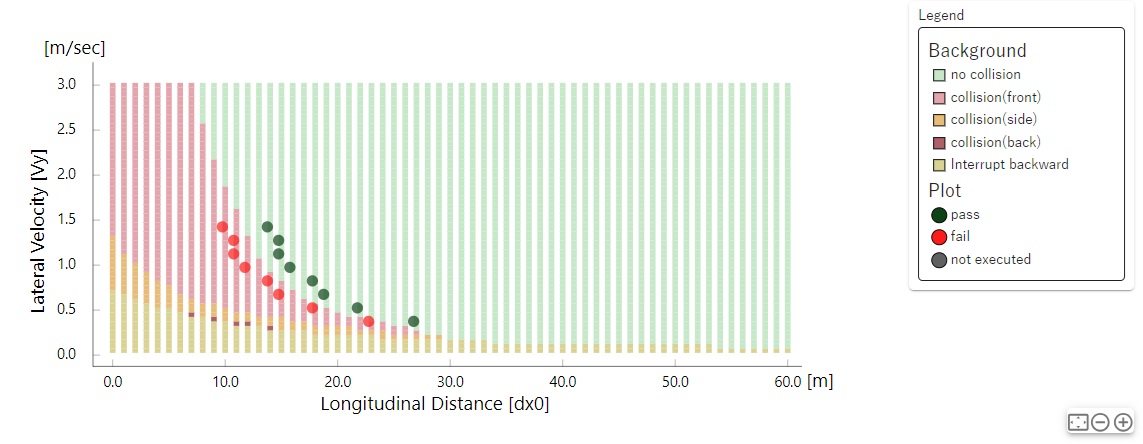
画面に表示されるプロットは3種類あり,緑色のプロットは衝突回避(pass),赤色のプロットは衝突(fail),灰色のプロットはシミュレーションが実行されないこと(not executed)を表しています.
尚,グラフの右上のマークは評価結果が全て衝突回避(PASS)の場合は緑のチェックマークが、衝突(FAIL)が1つでもあると赤のエクスクラメーションマークが表示されます.
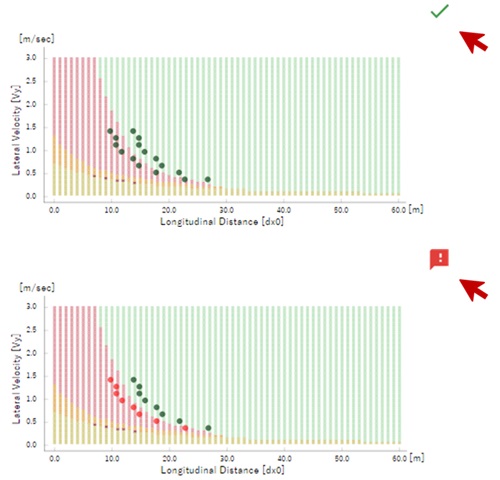
本マニュアルでは ⑤ 評価シナリオのシミュレーション実行 で示した通り,16の評価シナリオのシミュレーション結果(衝突回避/衝突)を回避可能/不可能に一致させるように設定しましたが,それに符合する内容が表示されています.