① 合理的に予見可能な範囲の定義¶
本章では,計測車や定点観測で収集した実交通流データを元に構築したシナリオデータベースを用いて,「合理的に予見可能な」範囲を定義する手順を説明します ※1.
概略は以下の通りです.
安全性評価を行うシナリオを 58シナリオ ※2 から選定し,シナリオを記述するパラメータの範囲を定義します.そして,それらの条件に合致する事例をシナリオデータベースから抽出します.抽出された事例群のなすパラメータの分布を確率分布で近似し,そのパーセンタイル値から「合理的に予見可能」な範囲を定義します.
※1 「合理的に予見可能な」範囲の定義方法が Defining Reasonably Foreseeable Parameter Ranges Using Real-World Traffic Data for Scenario-Based Safety Assessment of Automated Vehicles で提案されています.本マニュアルではその提案に沿って手順を説明します.
※2 FY24公開版では「No.2」「No.4」「No.5」「No.9」「No.10」「No.12」「No.13」「No.18」「No.20」「No.21」「No.23」「No.24」「No.26」「No.27」「No.30」「No.32」「No.33」「No.35」「No.36」「No.38」「No.39」「No.42」「No.52」から選定します.
シナリオの選定¶
画面左側にある上から2番目のアイコン※ を左クリックしてください.

※ シナリオデータベースのアイコンの名称/意味 はリファレンスに記載しました.¶
「Surrounding Traffic Databese」と名付けられたタブが追加されました※ .このタブを利用して「合理的に予見可能な」範囲を把握していきます.
※ 「合理的に予見可能な」範囲は後に説明する 例1 合理的に予見可能な範囲に基づく評価仕様の作成 に利用されます.その作業を考慮して「Surrounding Traffic Databese」タブが追加されました.
画面に表示されている「Select Scenario」を左クリックしてください.以下の画面が表示されます.
プルダウンメニューにある「Select ScenarioNumber」を左クリックしてください,以下のような複数の評価シナリオが表示されます.
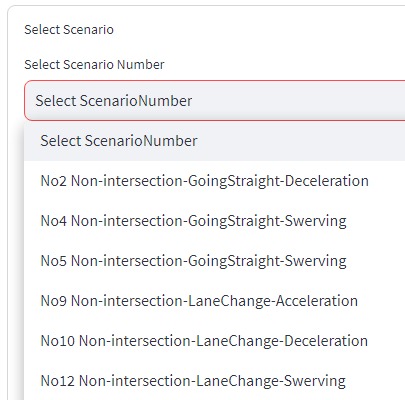
このチュートリアルで説明するシナリオは「No4 Non-intersection-GoingStraight-Swerving」(以降,「No.4」と略記)です.その表示を左クリックすると以下の画面が表示されます ※.
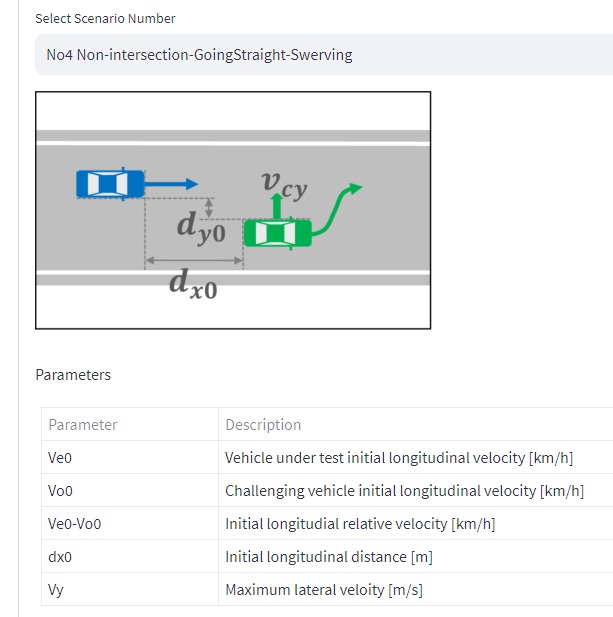
※ 図と説明文のパラメータ名が一致しておりません.今後修正する予定です.本マニュアルでは説明文のパラメータ名を使用します.例えば他車の横速度は \(V_{cy}\) ではなく, \(V_{y}\) を使用します.¶
説明文にある \(V_{e0}\) ~ \(V_y\) ,ならびに自車と他車の進行方向車間距離初期値 \(d_{x0}\) ,横方向車間距離初期値 \(d_{y0}\) の合計6つのパラメータがシナリオ「No.4」を記述するパラメータです.それらの内, \(d_{y0}\) は車線幅や自車/他車の車体幅を用いて計算されます. \(V_{e0}\) ~ \(V_y\) はシナリオデータベースを用いて設定していきます.
パラメータ |
意味 |
略記 |
|---|---|---|
\(V_{e0}\) |
自車 = 自動運転車両の速度初期値 |
自車速度初期値 |
\(V_{o0}\) |
自車の前方にカットインする他車の速度初期値 |
他車速度初期値 |
\(V_{e0}-V_{o0}\) |
他車を基準とした自車の相対速度初期値 |
自車相対速度 |
\(d_{x0}\) |
自車と他車の進行方向車間距離初期値 |
進行方向車間距離初期値 |
\(d_{y0}\) |
自車と他車の横方向車間距離初期値 |
横方向車間距離初期値 |
\(V_{y}\) |
他車の最大横速度 |
他車横速度 |
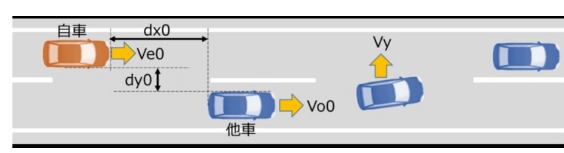
本図は自工会発行「自動運転の安全性評価フレームワーク Ver 3.0」より引用しました.シナリオ「No.4」では自車と他車は車線中央を走行している状態からスタートします.¶
ODD を考慮したパラメータの範囲の定義¶
シナリオ「No.4」を選んだ段階で,その条件に合致する事例がシナリオデータベースから抽出されます.
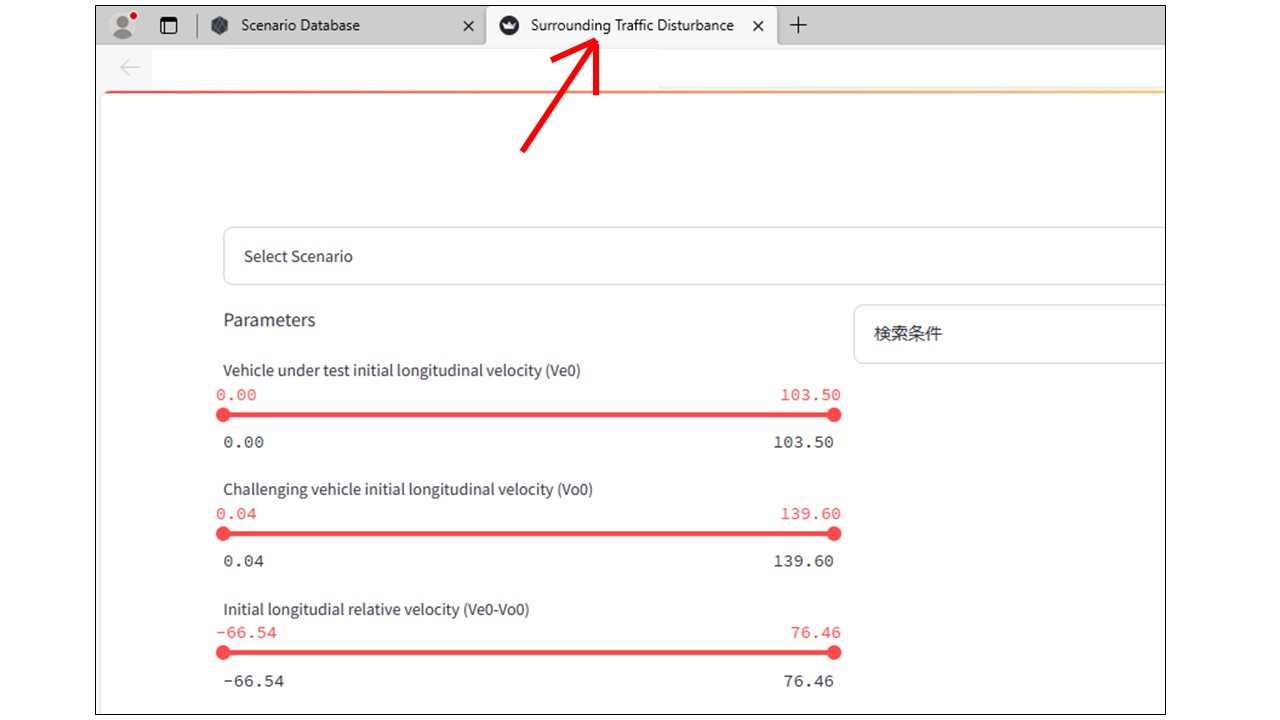
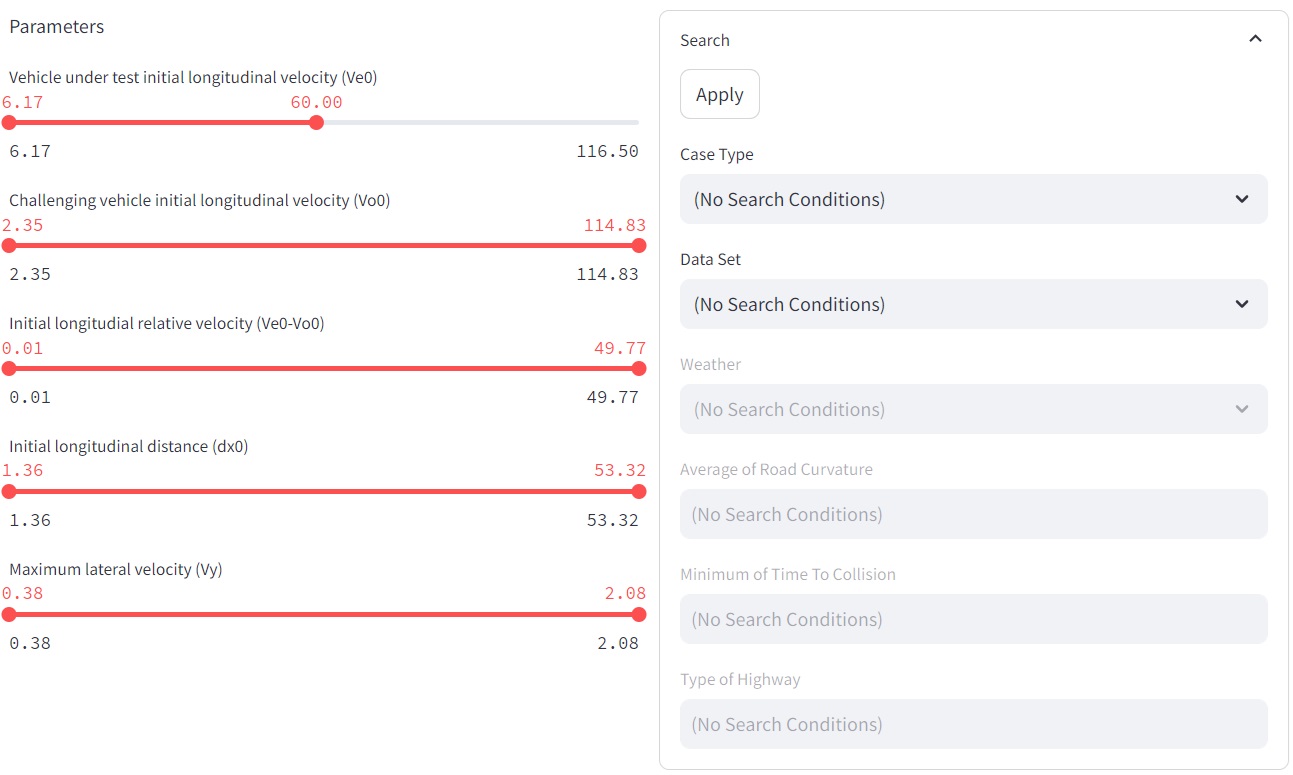
この事例群の分布を表す指標として,シナリオを記述するパラメータ(シナリオ「No.4」では5つ)の最大値・最小値が以下のように示されています.例えば,\(V_{e0}\) の最大値と最小値はそれぞれ116.50[km/h]と6.17[km/h]です.また,\(V_{e0}-V_{o0}\) の最大値と最小値はそれぞれ49.77[km/h]と0.01[km/h]です.

上記画面は各パラメータの最大値と最小値を示すとともに,後で説明するように,抽出されるデータの条件を設定するインターフェイスとなっています.
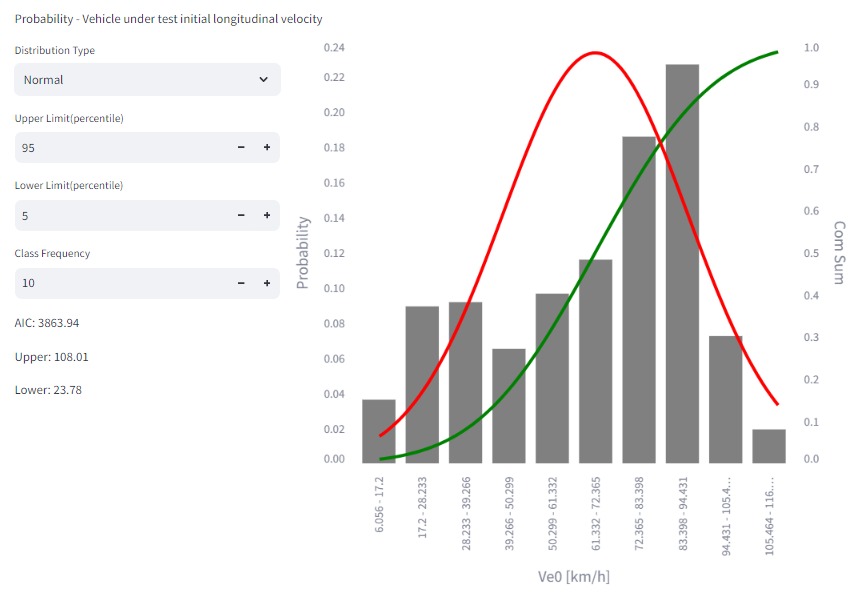
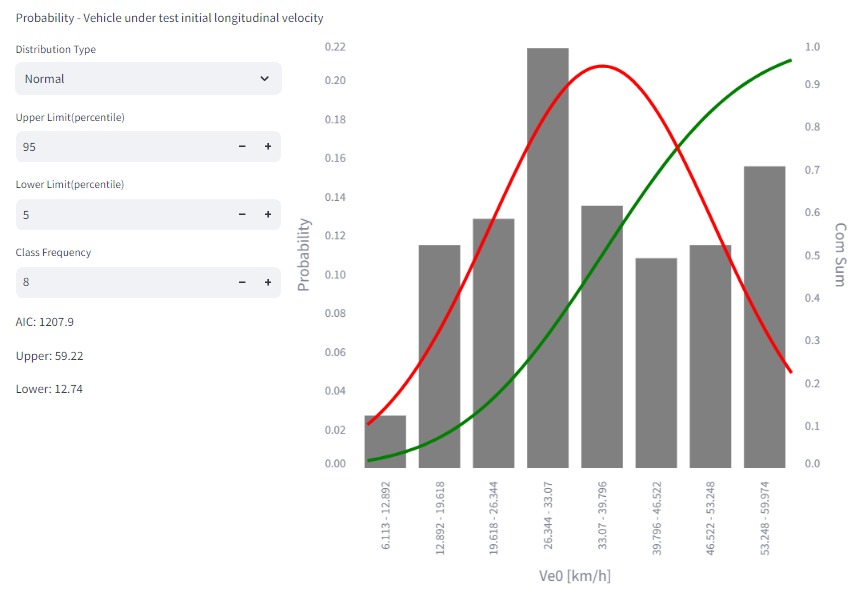
抽出される事例群に対する各パラメータの分布図が上記インターフェイスの下に表示されます.例えば,\(V_{e0}\) の分布は以下の棒グラフのように表示されています.画面に表示されている Distribution Type AIC:「赤池情報量基準」 Class Frequency の意味をリファレンスに記載しました.
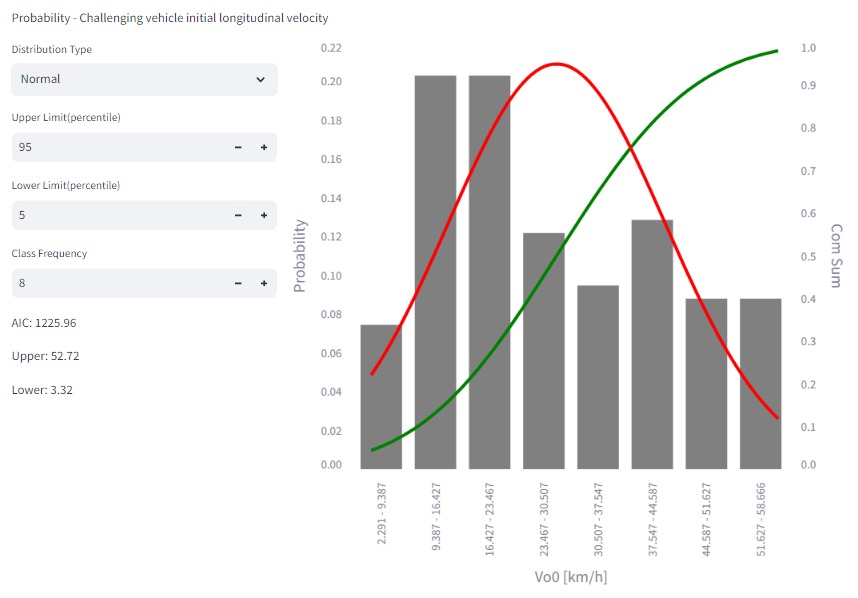
また,\(V_{o0}\) の分布は以下の棒グラフのように表示されています.
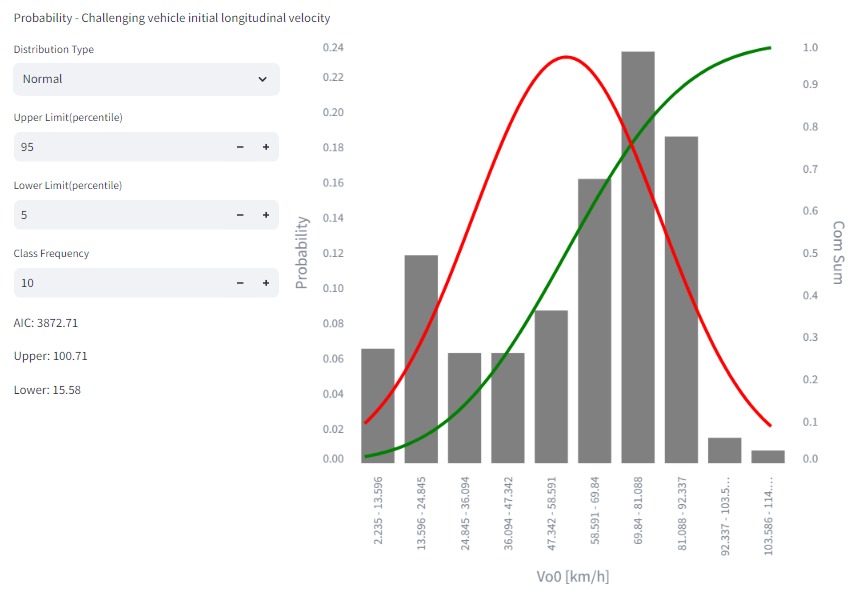
いずれもそれを近似する確率分布(赤線)およびその累積分布(緑線)と合わせて表示されています.確率分布の使い方は後で説明します.
ODD の条件として,”自車(=自動運転車両)の最高速度が60[km/h]”を考えてみましょう.その場合,シナリオ「No.4」で抽出された事例群から自車速度初期値 \(V_{e0}\) が60[km/h]を超過する事例を取り除いたものがより適切に「合理的に予見可能な」範囲を表していると考えられます.
以下のように \(V_{e0}\) の範囲を表す2つの点(赤色)の内,右側の点をスライドさせてください.パソコンの矢印キー「←」「→」(もしくは「↑」「↓」,「<」「>」)を使って点の位置を調整することもできます.
シナリオ「No.4」で,かつ, \(V_{e0}\) が60[km/h]以下の事例が抽出されます.この抽出に伴い, \(V_{e0}\) , \(V_{o0}\) をはじめ5つのパラメータの分布が修正されました.以下の棒グラフに \(V_{e0}\) と \(V_{o0}\) の分布を示します.
確率分布を用いた「合理的に予見可能」な範囲の定義¶
パラメータ分布の最大値と最小値のなす区間(=範囲)で「合理的に予見可能」な範囲を定義することが考えられます.しかし,評価すべきでない外れ値が最大値もしくは最小値に選ばれる可能性があります.それとは逆に,評価すべき値が区間に含まれない可能性もあります.これらを避けるために,正規分布などの確率分布でパラメータ分布を近似し,その確率分布の2つのパーセンタイル値(例えば5パーセンタイル値と95パーセンタイル値)で範囲を定義することが考えられます.
今回,分布を正規分布で近似し,1パーセンタイル値と99パーセンタイル値を用いて範囲を定義することを考えてみます ※.
※ 3σ区間は約0.27パーセンタイル値と約99.73パーセンタイル値の範囲に相当します.
最初に \(V_{e0}\) の範囲を調べます.以下に示すように,\(V_{e0}\) の分布の左側に表示された「Distribution Type」を「Normal」のままとし,「Upper Limit(percentile)」「Lower Limit(percentile)」をそれぞれ 99 と 1 に修正してください.
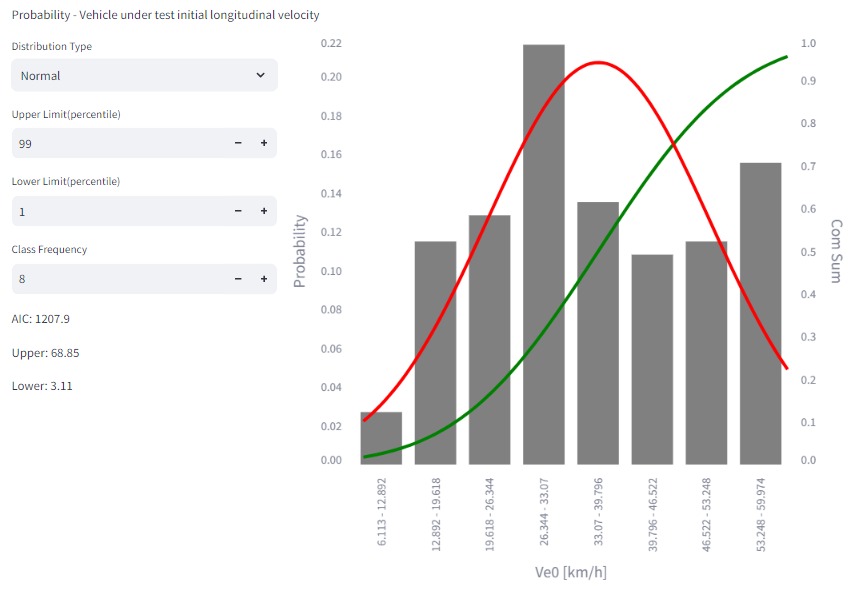
「Upper: 68.85」「Lower: 3.11」はそれぞれ99パーセンタイル値,1パーセンタイル値に相当します.\(V_{e0}\) の範囲は3.11[km/h]~68.85[km/h]であることが判ります.
同様に \(V_{o0}\) に関しても「Distribution Type」「Upper Limit(percentile)」「Lower Limit(percentile)」を設定し,\(V_{o0}\) の範囲を調べます.
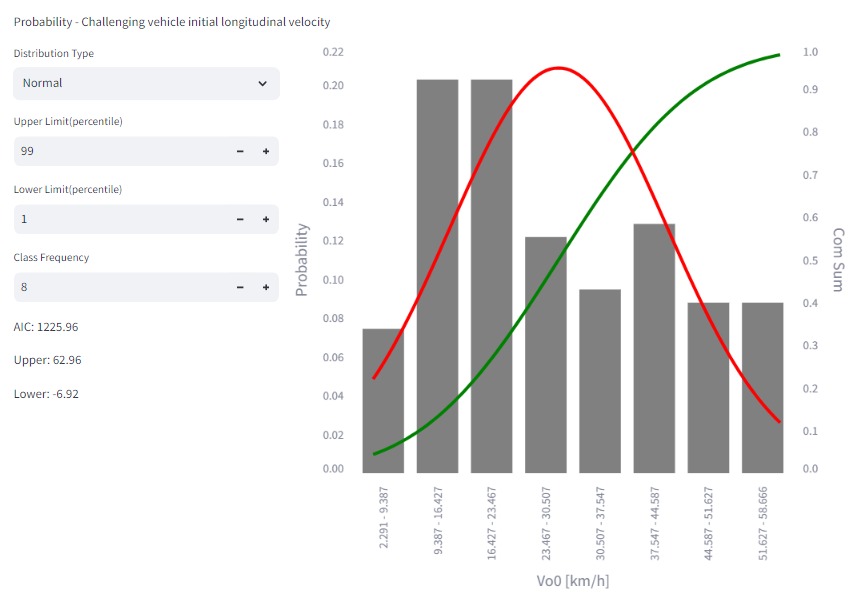
「Upper: 62.96」「Lower: -6.92」はそれぞれ99パーセンタイル値,1パーセンタイル値に相当します.\(V_{o0}\) は「自車の前方にカットインする他車の速度初期値」であり,マイナスとならないため,その範囲は0[km/h]~62.96[km/h]であると考えられます.
\(V_{e0}-V_{o0}\) ,\(d_{x0}\) ,\(V_{y}\) に対しても同様の作業を行います.5つのパラメータの範囲は以下のようになりました.これらの範囲は③ 評価仕様の作成の 回避可能な範囲に基づく評価仕様の作成 時に使用します.
パラメータ |
範囲 |
|---|---|
\(V_{e0}\) |
3.11~68.85[km/h] |
\(V_{o0}\) |
0.00~62.96[km/h] |
\(V_{e0}-V_{o0}\) |
0.00~25.25[km/h] |
\(d_{x0}\) |
0.00~46.66[m] |
\(V_{y}\) |
0.28~1.53[m/s] |
参考:事例群の分布表示¶
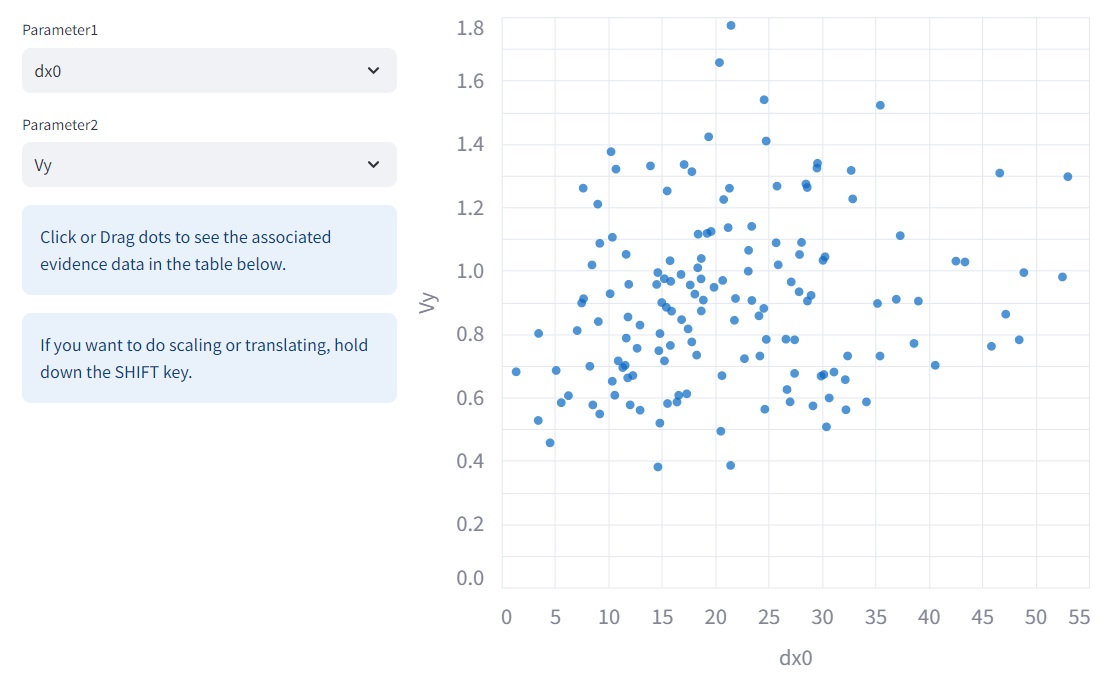
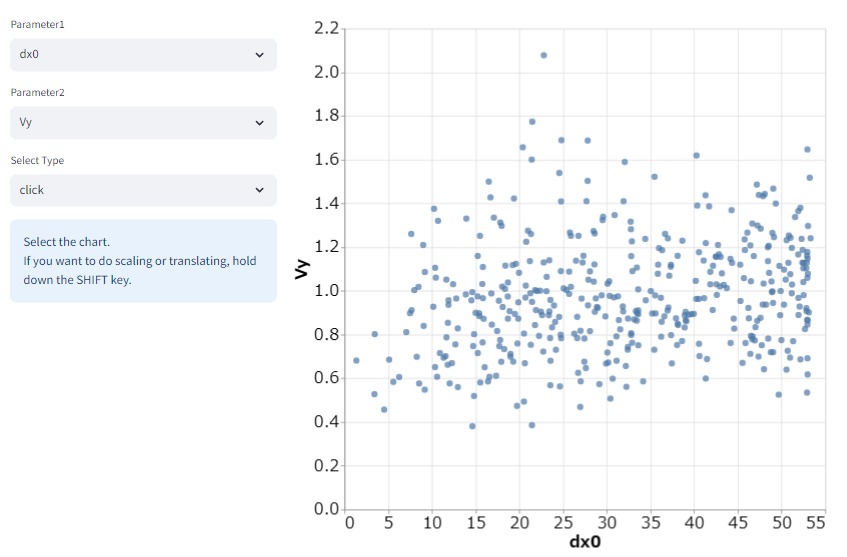
「合理的に予見可能」な範囲の算出に用いた事例群の分布をパラメータの2次元平面で確認することができます.画面の一番下までにスクロールして図の横軸(Parameter1)/縦軸(Parameter2)に \(d_{x0}\) / \(V_{y}\) を選んでください.
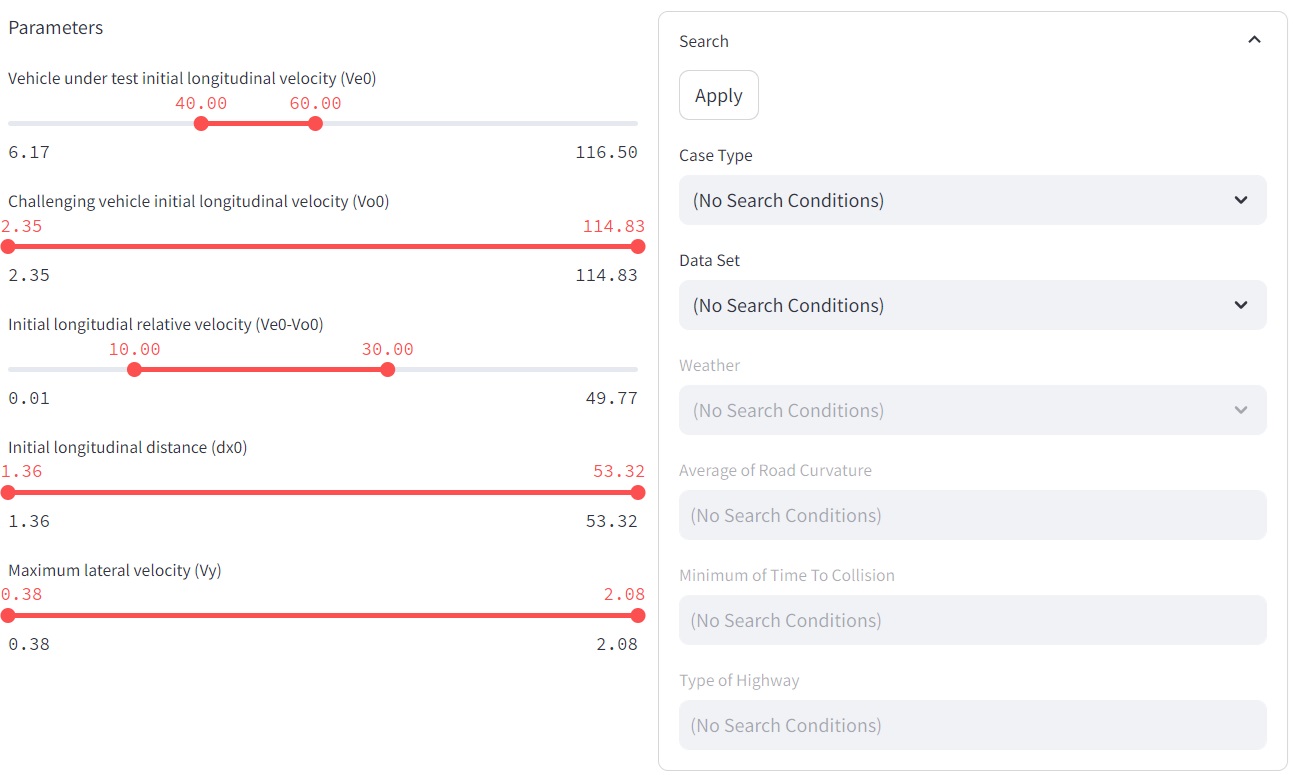
この分布は \(V_{e0}\),\(V_{e0}-V_{o0}\) の値によって異なることが考えられます.以下のように \(V_{e0}\),\(V_{e0}-V_{o0}\) の範囲を限定してください.
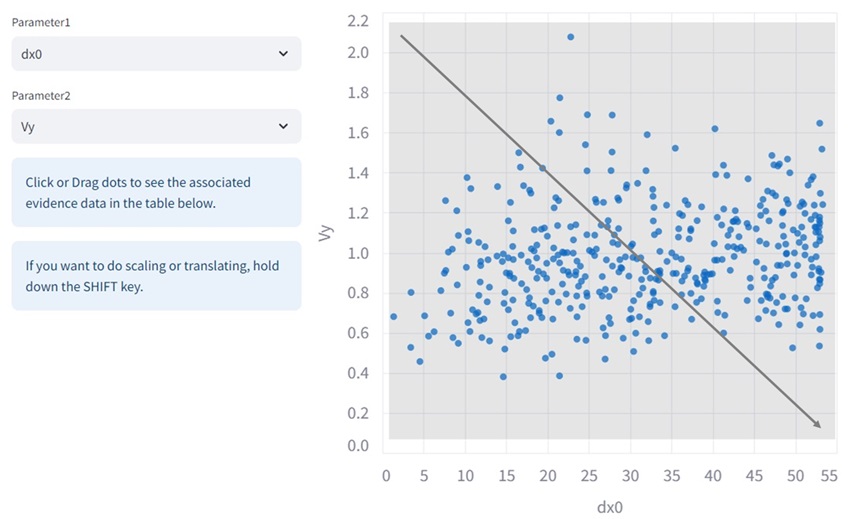
横軸(Parameter1)/縦軸(Parameter2)を \(d_{x0}\) / \(V_{y}\) とする事例群の分布は以下のようになります.
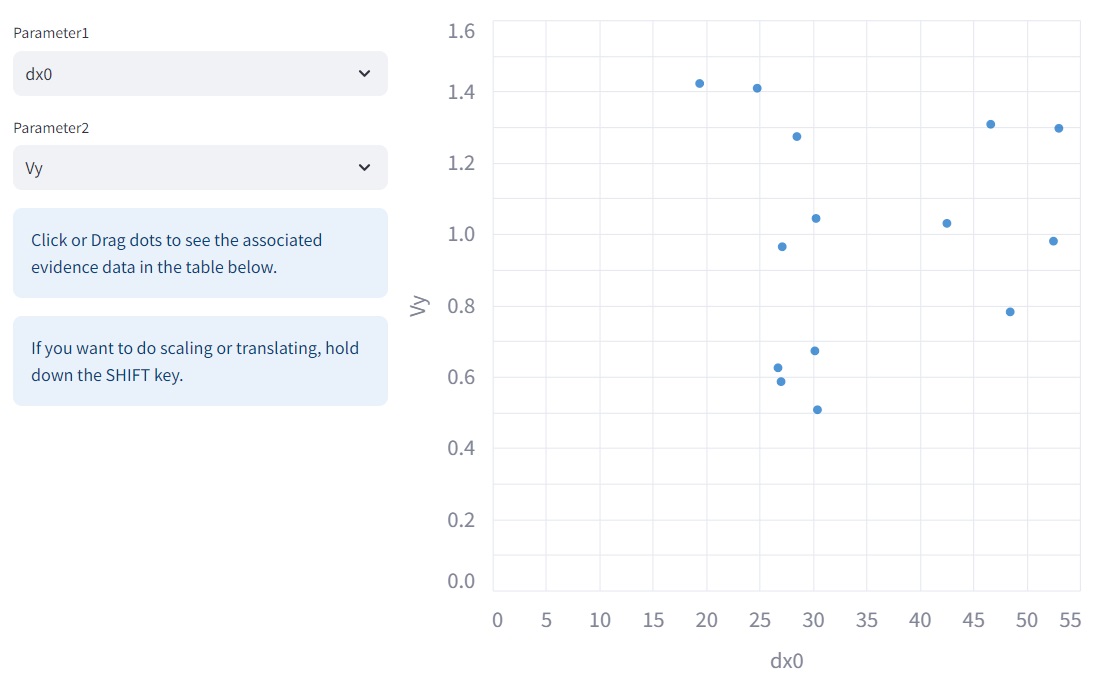
この分布は事例数は少ないものの局所的な分布の様子を表していると考えられます.このパラメータ絞り込みによって得られた結果(確率分布で近似した際の,1パーセントタイル値と99パーセントタイル値)を以下に示します.
パラメータ |
範囲 |
|---|---|
\(V_{e0}\) |
35.25~64.76[km/h] |
\(V_{o0}\) |
16.31~52.50[km/h] |
\(V_{e0}-V_{o0}\) |
5.47~25.73[km/h] |
\(d_{x0}\) |
9.52~60.14[m] |
\(V_{y}\) |
0.28~ 1.71[m/s] |
参考:検索条件¶
ODDの条件として,”自車(=自動運転車両)の最高速度が60[km/h]”を考えてきました.このようなパラメータの範囲を用いた条件とは別に,Case type(計測対象=高速道路や一般道など,計測された道路の種別)やData Set(データセット=計測車両や定点観測など,計測方式の種別),Weather(天候)などの条件が考えられえます.後者による条件をここでは単に「検索条件」と呼んでおり,パラメータの範囲を設定する箇所の右側に,以下のように用意されています.
表記 |
内容 |
|---|---|
Case Type |
計測対象 |
Data Set |
データセット |
Weather |
天気 |
Average of Road Curvature |
道路曲率平均値 |
Minimum of Time To Collision |
TTC(最小値) |
Type of Highway |
高速種別 |
今回の公開版では「検索条件」の機能を実現するためのデータ準備が完了しておりません.本チュートリアルでは「検索条件」を設定しないで説明を続けます.
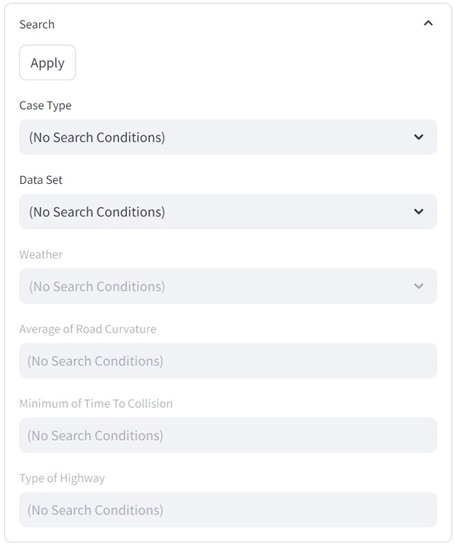
参考 「検索条件」における Case Type や Data Set などの設定方法を参考として説明します.例えば, Case Type には((No Search Conditions), Highway, General Road)の3つの選択肢がありますが,それらのいずれかひとつを選択します.以下に Case Type としてHighway, Data Set としてFixed Pointを選択した様子を示します.
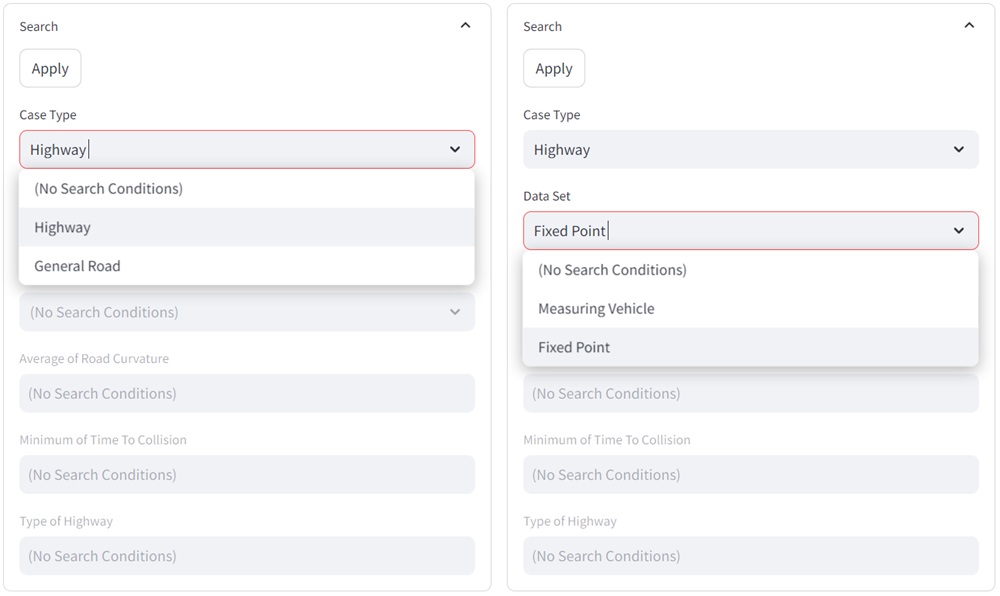
補足 「検索条件」を設定して「Apply」ボタンを左クリックしてしまった場合,この後に続くチュートリアルの内容を追えなくなります.もし,Applyボタンを左クリックしてしまった場合,「Surrounding Traffic Databese」のタブの×マークを左クリックして「Surrounding Traffic Databese」のタブを閉じてください.その後,「合理的に予見可能な範囲の定義」の最初からやり直してください.¶
導出根拠の確認¶
評価シナリオの条件に該当する事例群の分布から「合理的に予見可能な」範囲を定義しましたが,観測日時,観測場所,道路形状,観測方法,データ処理管理番号など,各事例を特定化する様々な情報(トレーサビリティデータ)を確認できます.
以下,シナリオ「No.4」を例に採り,「 観測日時」,「 道路形状 」を調べる手順を説明します.
先ほど,以下のように \(V_{e0}\),\(V_{e0}-V_{o0}\) の範囲を限定しました.
説明の都合上,この \(V_{e0}\),\(V_{e0}-V_{o0}\) の範囲を以下のように変更してください ※1.
※1 すべての事例の詳細情報を提示すべく準備しておりますが,現時点では完了しておりません.58の各シナリオ毎に数事例の準備ができた状態ですので,抽出条件を緩くして導出根拠の確認手順を説明します.今回,パラメータの条件を付けず,シナリオ「No.4」の全事例を抽出します.
以下の画面が表示されます.シナリオ「No.4」の全事例の { \(d_{x0}\) ,\(V_{y}\) }が表示されています.
次に画面全体を覆うように範囲の隅 ※2 を左クリックしホールドしたままマウスを移動させ,反対 ※3 の隅でホールドを解除してください.以下の画面のように全事例が選択された状態となります.
※2 左上,右上,左下,右下のいずれの隅でも構いません.
※3 例えば,左上の反対は右下,右上の反対は左下のようになります.
その操作の結果,画面の一番下に以下の情報が表示されます.
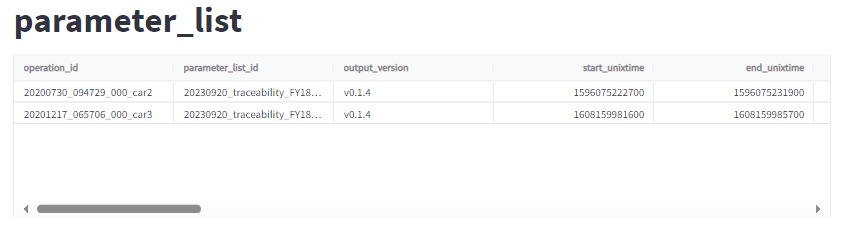
「Parameter_list」の表示に2行の情報が表示されています.本来,先ほど選択した全事例分の情報が表示されることになりますが,F24公開版では準備が間に合わず,2事例のみの表示となっております.
「Parameter_list」を説明します.まず, { \(d_{x0}\) ,\(V_{y}\) }の分布図の下に表示されている「Link to ER Diagram of Evidence Data」を左クリックしてください.以下のER Diagram ※4 を記したPDFファイルがダウンロードされます.「Parameter_list」はER Diagram では「パラメータリスト」と表記されています.
※4 ER Diagram(Entity Relationship Diagram)とはデータベース設計における代表的な設計図のことです。
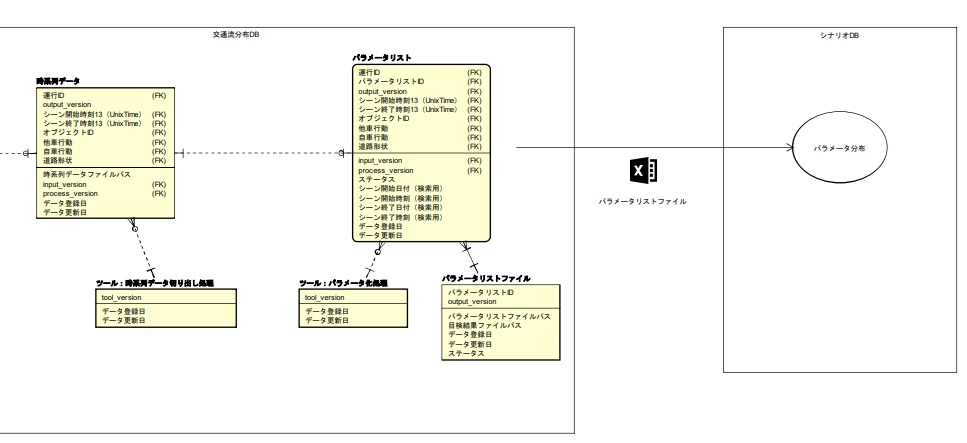
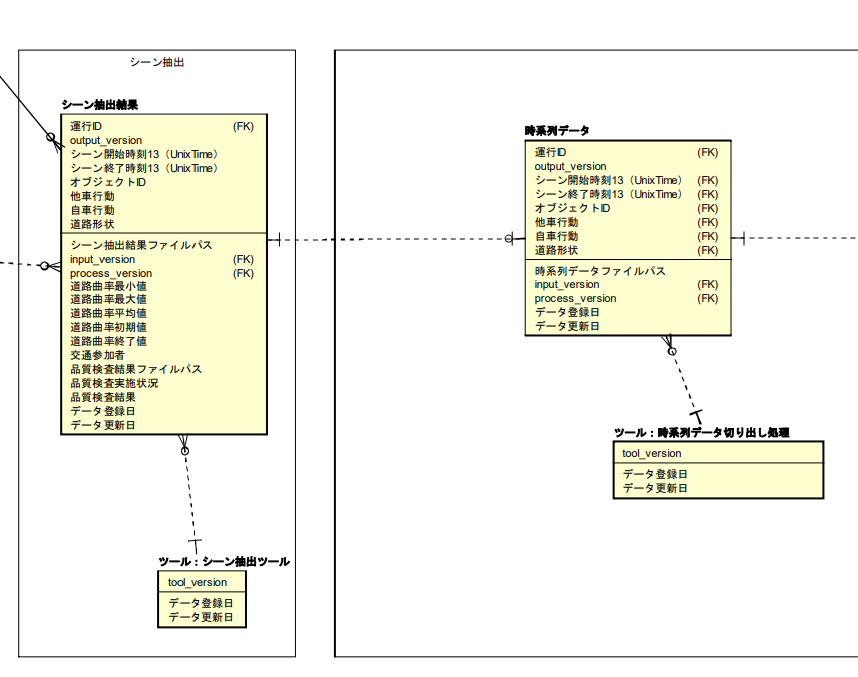
「パラメータリスト」とは「運行ID」「パラメータリストID」「output_version」などで構成されるリストであり,「パラメータリストファイル」「ツール:パラメータ化処理」「時系列データ」とリンクされていることが判ります.また,「時系列データ」は「シーン抽出結果」「ツール:時系列データ切り取り処理」とリンクされていることが判ります.このようにデータ間にリンクが張られており,リンクをたどって必要なデータを調べることができます.
「パラメータリスト」に含まれる「シーン開始日(検索用)」「シーン開始時刻(検索用)」を調べることにします.
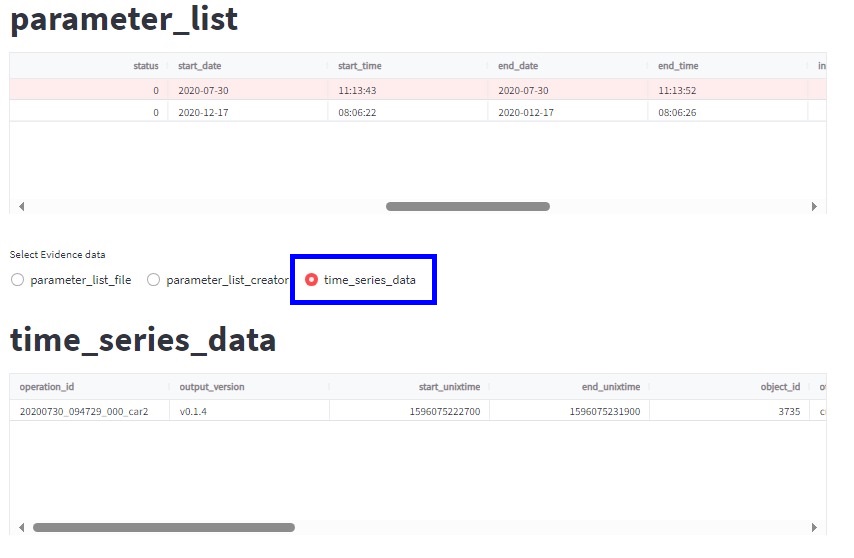
「Parameter_list」(パラメータリスト)の下にあるスライダを調整して,以下の画面が表示されるよう調整してください.
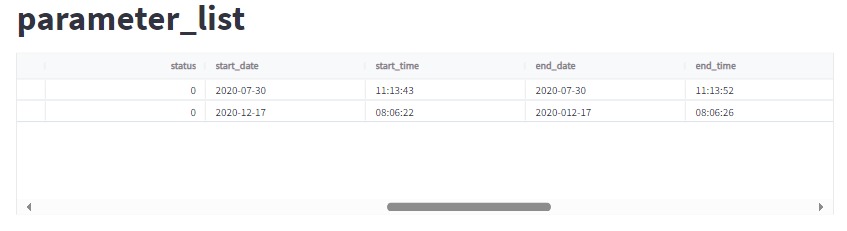
1行目の事例の「シーン開始日(検索用)」(start_date)は2020年7月30日,「シーン開始時刻(検索用)」(start_time)は11時13分43秒であることが判ります.
次に「道路 疑似曲率 最小値」「道路疑似曲率最大値」を調べる手順を説明します.それらは「シーン抽出結果」に含まれています,
「Parameter_list」の1行目に登録された事例を左クリックしてください.以下の画面が表示されます ※5.
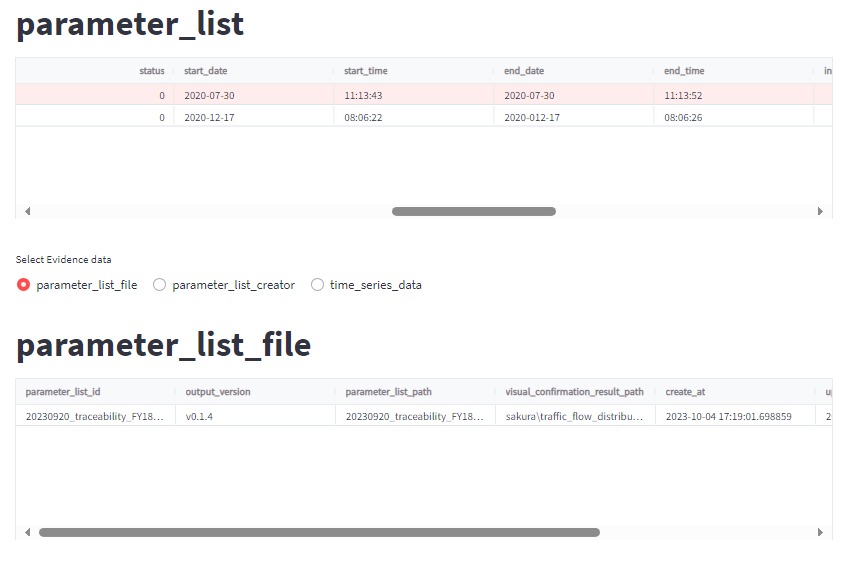
※5 「parameter_list_file」「parameter_list_creator」「time_series_data」はER Diagramの「パラメータリストファイル」「ツール:パラメータ化処理」「時系列データ」に対応します.¶
画面に表示されている「time_series_data」の左側に表示されている〇印を左クリックしてください(青枠内).以下のように赤色となります.
「time_series_data」に表示されている1事例を左クリックすると,以下の画面が表示されます ※6 .
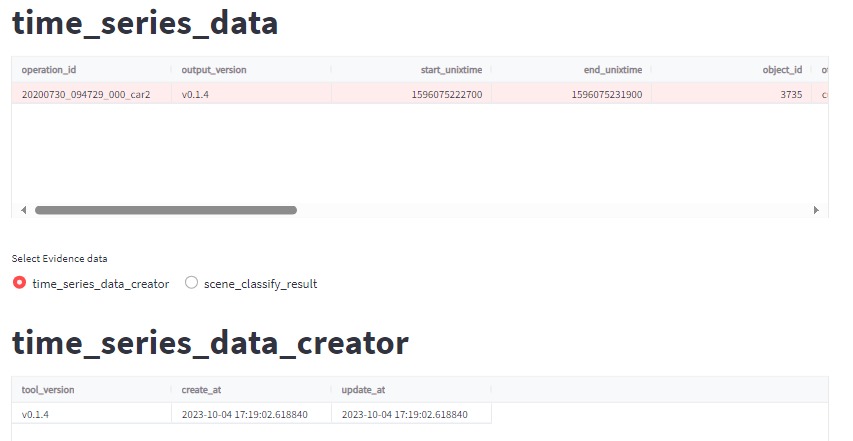
※6 「time_series_data_creator」「scene_classify_result」はER Diagram の「ツール:時系列データ切り出し処理」「シーン抽出結果」に対応します.¶
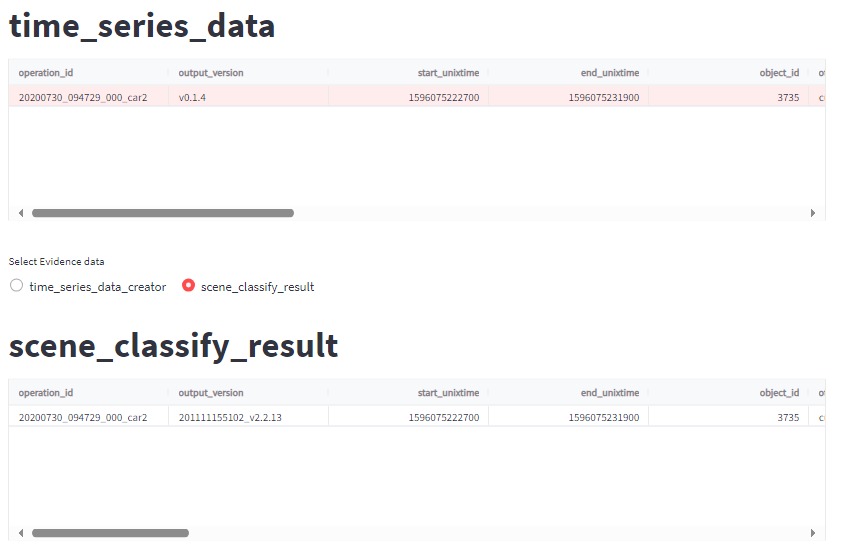
画面に表示されている「scene_classify_result」の左側に表示されている〇印を左クリックしてください.以下のように赤色となります.
「scene_classify_result」の下にあるスライダを調整して,以下の画面が表示されるよう調整してください.
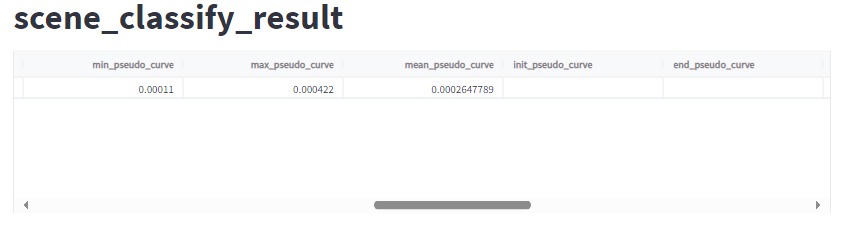
事例の「道路疑似曲率最小値」は 0.00011[1/m],「道路疑似曲率最大値」は 0.000422[1/m]であることが判ります.
このようにして,ER Diagramを用いてデータ間のリンクを確認し,リンク先の情報を調べることができます.以上を持ちまして,「導出根拠の確認」の説明を終了します.