SAKURA RESEARCH PROJECT

The SAKURA project (Safety Assurance KUdos for Reliable Autonomous vehicles) is one of the coordinated initiatives funded by the Ministry of Economy, Trade and Industry (METI) of Japan, under the strategies defined by the Committee on Business Discussions on Autonomous Driving Technologies. This committee was established in February 2015 and oversees All-Japan initiatives by industry, academia and government sectors, including a Roadmap for Deployment of Autonomous Driving Services, demonstration tests and efforts for harmonization areas.
The first phase of the SAKURA project occurred from mid-2018 until the end of March 2021, whereas the second phase commenced in April 2021 and shall continue for four years. The con-tents included in this homepage relate to the results of the first phase of the SAKURA project. The second phase of the SAKURA project will take into consideration the outcomes and results from this homepage.
SAKURA Physics Principles Approach Process
The number of possible safety-relevant disturbance factors that an AD system may be confronted with in real traffic is commonly deemed infinite. When a scenario-based safety evaluation approach is adopted, logically structured scenarios become necessary to facilitate the handling of a large number of variables and to enable testing of these scenarios. The SAKURA methodology focuses on structuring scenarios based on a description from the perspective of the AD system.
In contrast with the infinite number of safety-relevant scenarios that an AD system may be con-fronted with in real traffic, the number of physics principles that an AD can rely on for the safe handling of such scenarios is limited. Currently, AD systems are designed to decompose the dynamic driving task (DDT) into perception, judgement and control subtasks, and each of these subtasks is associated with one or several specific physics principles.
Therefore, if disturbance factors and their corresponding scenarios are decomposed and logically structured in accordance with the physics of the AD system, then it is possible to provide a holis-tic coverage of all the reasonably foreseeable safety-relevant root causes for a given DDT (See Figure). [JAMA AD framework]
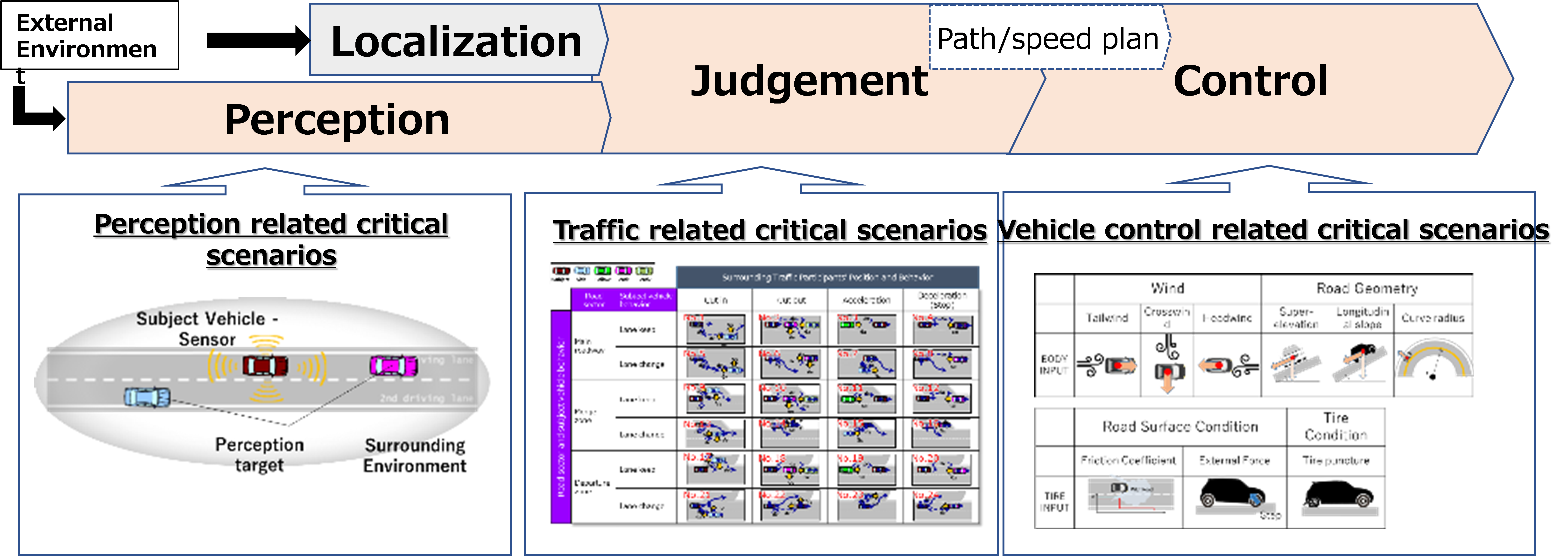
Fig. Physics Principles Approach Process
SAKURA Scenario generation and safety evaluation process
The SAKURA project adopted the definitions for functional, logical, and concrete scenarios originally developed by the PEGASUS project and adapted its activities to the realization of the scenario generation and safety evaluation process presented in Figure.
The structure for functional scenarios is developed following a systematic combinatorial approach that defines all safety relevant elements of a scenario and their combinations for each of the three disturbance categories previously described. [JAMA AD framework]
Logical scenarios are defined by assigning parameter ranges to the functional scenarios. These ranges are preferably to be defined by means of a data-driven approach that systematically ex-tracts and processes vehicle trajectories from traffic monitoring data. However, in the majority of scenarios the traffic data will not contain enough amount of critical situations and crashes to address statistically significant conclusions. Therefore complementary methodologies, for example to extrapolate the collected data to generate synthetic scenarios with safety critical condition, have been developed within the SAKURA project [Nakamura et al. 2021].
Finally, concrete scenarios are defined from the logical scenarios by means of a parameter search engine to select concrete values from the parameter distribution. Different methodologies may be applied for this purpose [Akagi et al. 2019, Thal et al. 2020]. Once the concrete scenarios are defined, safety criteria that allow for discrimination between safe and unsafe conditions become necessary. These safety criteria shall be defined by the corresponding authorities.
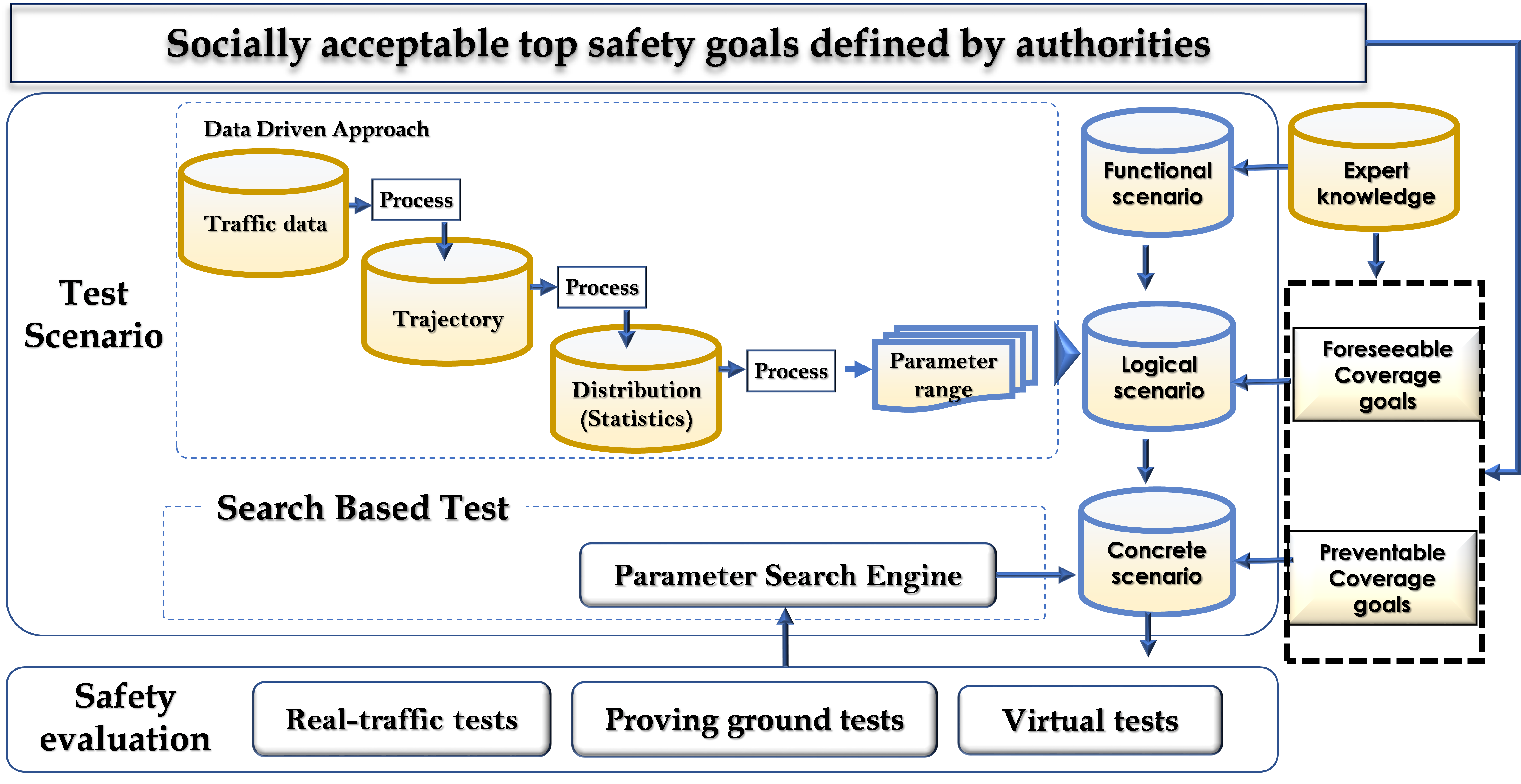
Fig. the realization of the scenario generation and safety evaluation process