Traffic Data Acquisition and Analysis
Traffic data acquisition aims to analyze trajectories of ego and surrounding vehicles and to define vehicle motion parameter ranges for logical scenarios.
In the SAKURA project, data is collected using the test vehicle and fixed location camera technology, shown in the table. These data collection and analysis technologies were established through research and development under the SAKURA project.
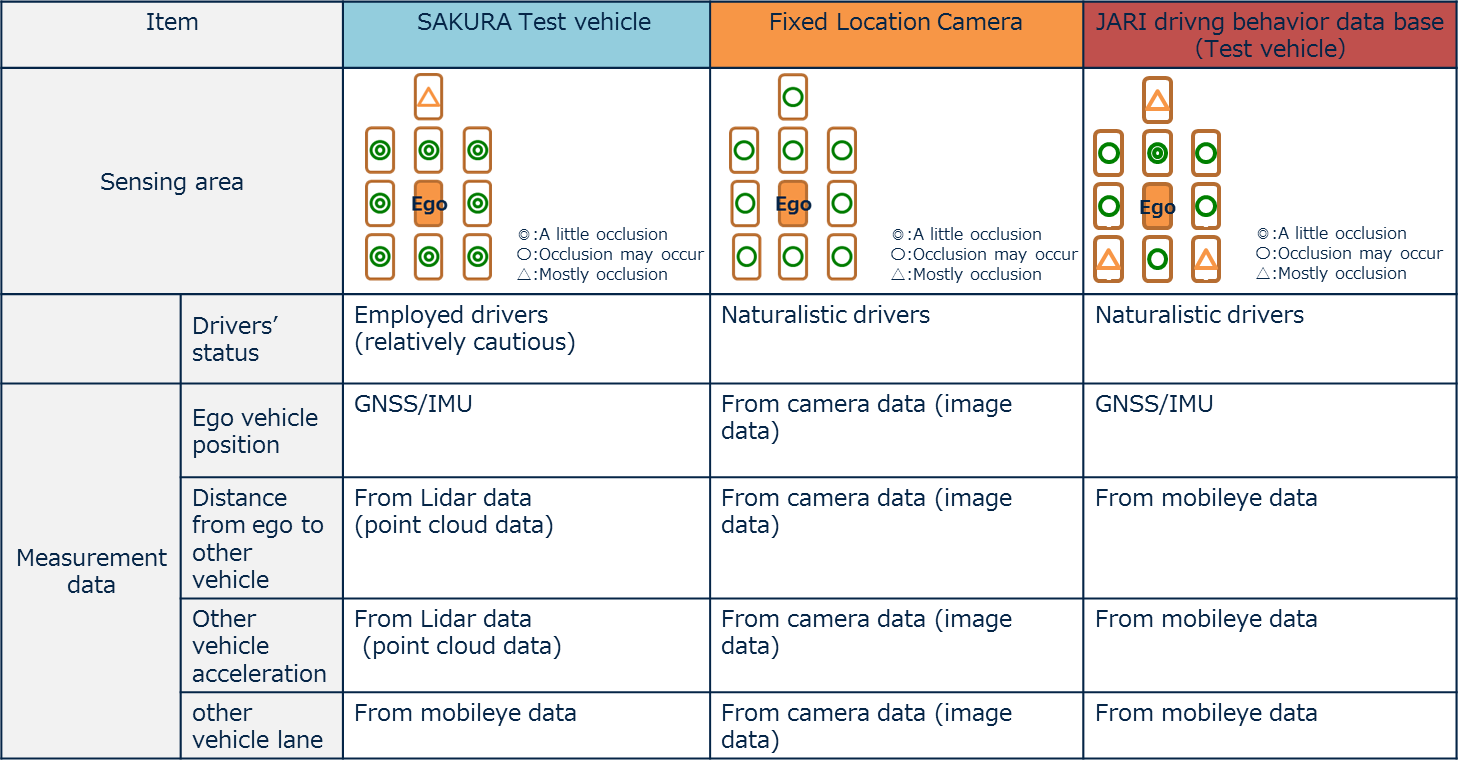
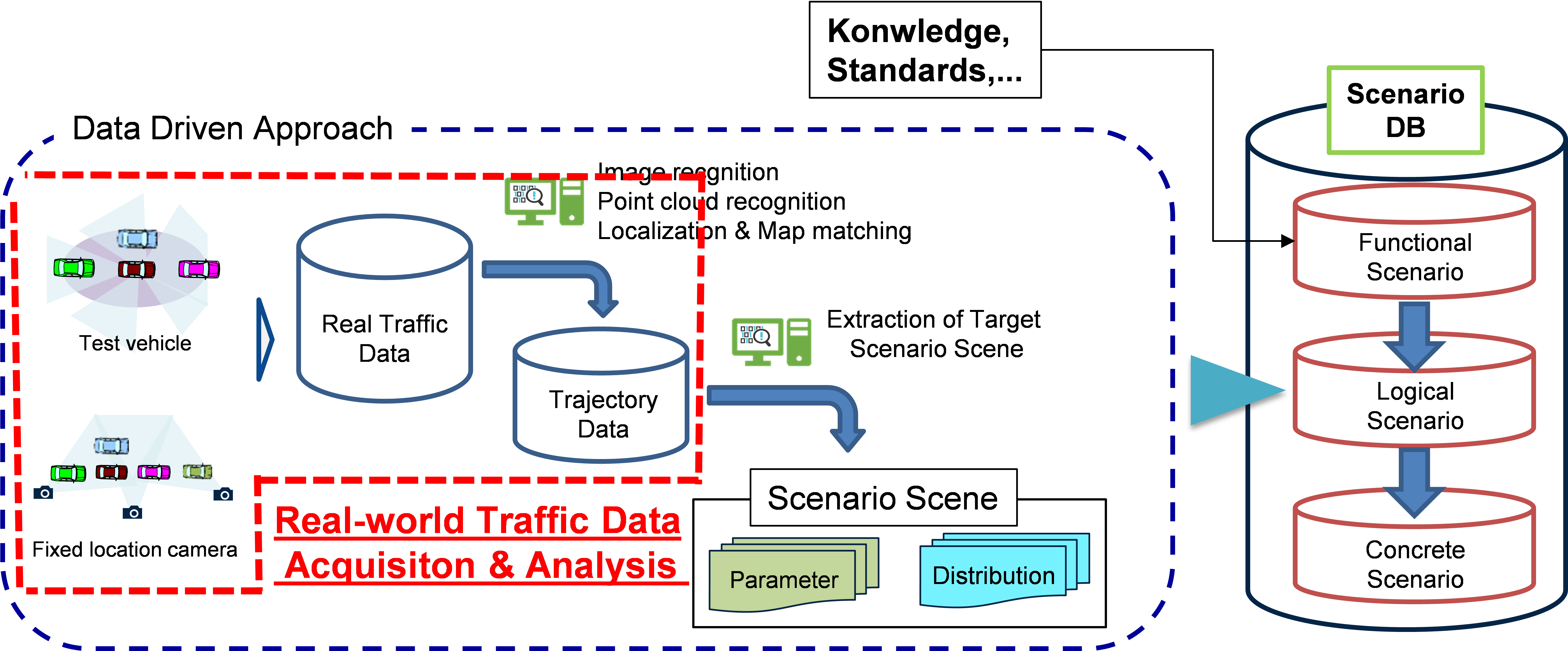
Fig. Real traffic data acquisition systems and corresponding part
※The measurement vehicle collected about 3200-hour data while driving on the Metropolitan Expressway and intercity expressways.
※Fixed location cameras collected data at 10 locations, such as junctions and branch roads, which are highly location-dependent.
Traffic data acquisition utilizing test vehicles
SAKURA Test Vehicle Specification
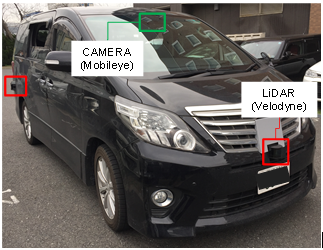
In the SAKURA test vehicle, surrounding vehicles data is acquired by multiple LiDARs and cameras. Additionally, GNSS / IMU is used to obtain information on the position of the vehicle.
Trajectory extraction from acquired traffic data by SAKURA Test Vehicle
For data collected by the measurement vehicle,
- Extraction of surrounding vehicles by point cloud recognition
- Localization utilizing GNSS / IMU information and high-precision map information
- The trajectory information (numerical value) of the ego-vehicle and other-vehicles is extracted.
- Vehicle trajectories of the ego vehicle are measured with ground coordinate system
- Vehicle trajectories of others are measured with coordinate system on ego vehicle
Recognition of surrounding vehicles (Point cloud recgnition)
Higher accuracy of vehicle trajectory (Localization & Map matching)
Traffic data acquisition by fixed location cameras
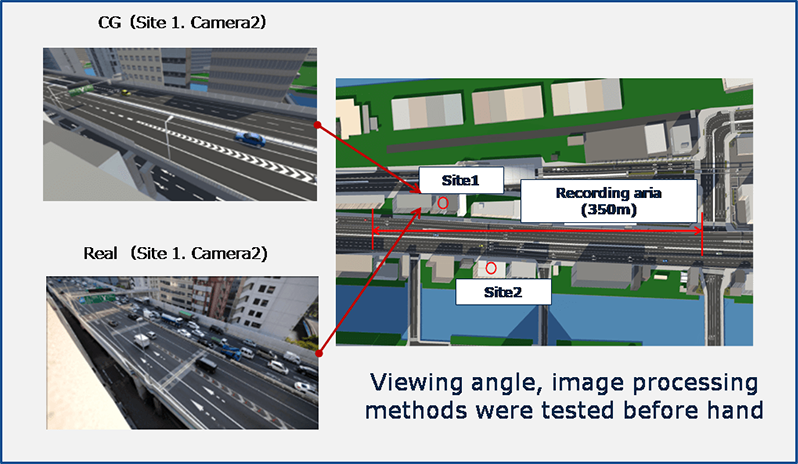
Fixed location cameras Specification
In fixed location (observation by) camera, high-quality cameras are installed at measurement points (such as the rooftops of high-rise buildings) to collect real traffic data. Before the measurement, the camera installation location is selected using a simulation, and the accuracy is verified by the simulation.
Trajectory extraction from acquired traffic data by Fixed location cameras