SAKURAプロジェクト

SAKURAプロジェクト(Safety Assurance KUdos for Reliable Autonomous vehicles)は、自動走行ビジネス検討会が定めた戦略に基づき、日本の経済産業省(METI)が実施している協調的取り組みの1つです。この検討会は2015年2月に設立され、自動運転サービスの導入ロードマップの実現に向け、実証実験の支援、協調領域の課題解決など、産学官によるオールジャパンの取り組みを推進しています。
SAKURAプロジェクトの第1フェーズは2018年半ばから2021年3月末まで行われ、第2フェーズは2021年4月に開始され、その後4年間継続されます。このホームページに掲載されている内容は、SAKURAプロジェクトの成果に関連しています。
SAKURA原理原則アプローチプロセス
実際の交通状況において、ADシステムが直面する可能性のある安全に関連する外乱要因の数は、一般的に無限であると考えられています。シナリオベースの安全性評価アプローチを採用する場合、多数の変数の処理を容易にし、シナリオ群をテストできるようにするために、論理的に構造化されたシナリオ群が必要となります。SAKURAの方法論は、ADシステムの観点からの記述に基づいてシナリオ群を構造化することに重点を置いています。
実際の交通において AD システムが直面する可能性のある安全関連シナリオの数は無限であるのに対し、そのようなシナリオを安全に処理するために AD が頼ることができる原理原則の数は限られています。現在、AD システムはダイナミックドライビングタスク (DDT) を認知、判断、制御のサブタスクに分解するように設計されており、これらのサブタスクはそれぞれ 1 つまたは複数の特定の原理原則に関連付けられています。
したがって、外乱要因とそれに対応するシナリオをADシステムの物理特性に従って分解し、論理的に構造化すれば、特定のDDTについて、合理的に予見可能なすべての安全に関する根本原因を包括的に網羅することが可能になる(図参照)。[JAMA ADフレームワーク]
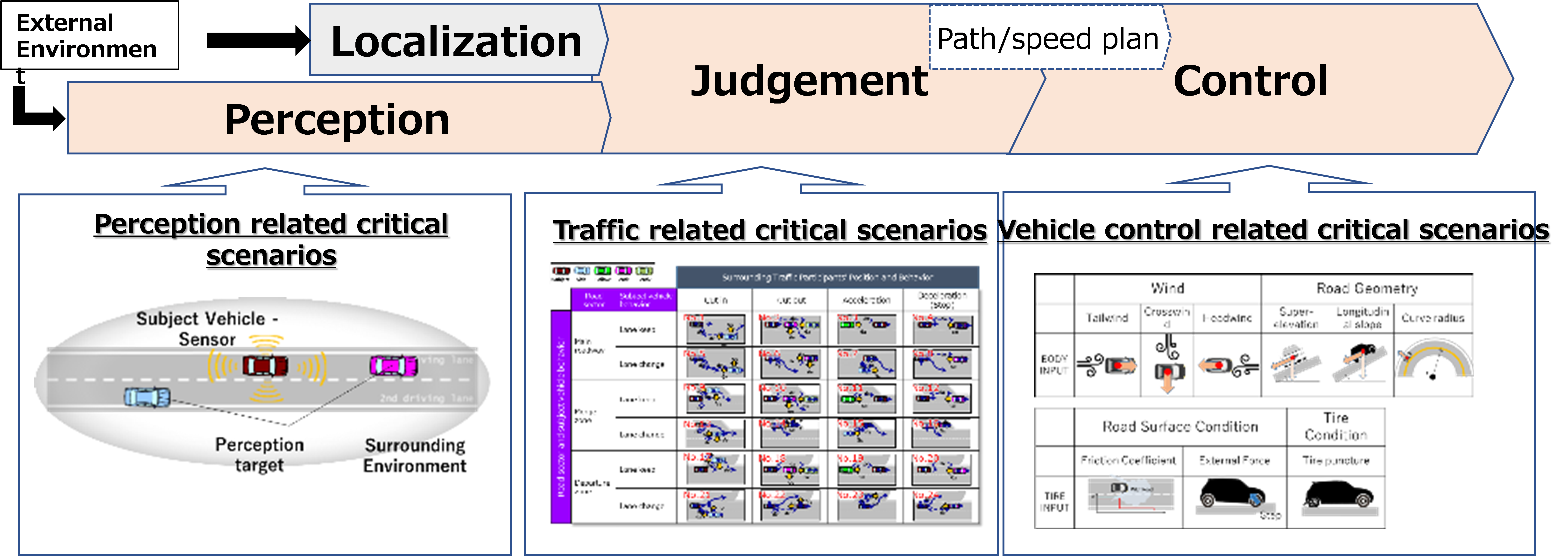
図:原理原則アプローチプロセス
SAKURAシナリオ生成と安全性評価プロセス
SAKURA プロジェクトでは、PEGASUS プロジェクトで開発されたFunctional、Logical、およびConcreteシナリオの定義を採用しました。また、PEGASUSプロジェクトの活動をシナリオ生成および安全性評価プロセス(図中に示す)の実現に適応させました。
シナリオのすべての安全関連要素と、前述の3つの外乱カテゴリーそれぞれについてそれらの組み合わせを定義する系統的組み合わせアプローチに従って、Functionalシナリオの構造が開発されます。[JAMA ADフレームワーク]
Logicalシナリオは、Functionalシナリオにパラメータ範囲を割り当てることで定義されます。この範囲は、交通データから車両の軌跡を体系的に抽出・処理するデータ駆動型アプローチによって定義することが望ましいです。しかしながら、多くのシナリオでは、交通データには統計的に有意な結論を導き出すのに十分な数の危険な状況や衝突が含まれていません。そのため、収集されたデータを外挿して危険な状況を表す仮想シナリオを生成するなど、補完的な手法がSAKURAプロジェクト[Nakamura et al. 2021]において開発されています。
最後に、パラメータ分布から具体的な値を選択するパラメータ検索エンジンを用いて、LogicalシナリオからConcreteシナリオが定義されます。この目的には様々な方法論が適用可能です[Akagi et al. 2019, Thal et al. 2020]。具体的なシナリオが定義されると、安全な状態と危険な状態を区別できる安全基準が必要になります。これらの安全基準は、関係当局によって定義されることになります。
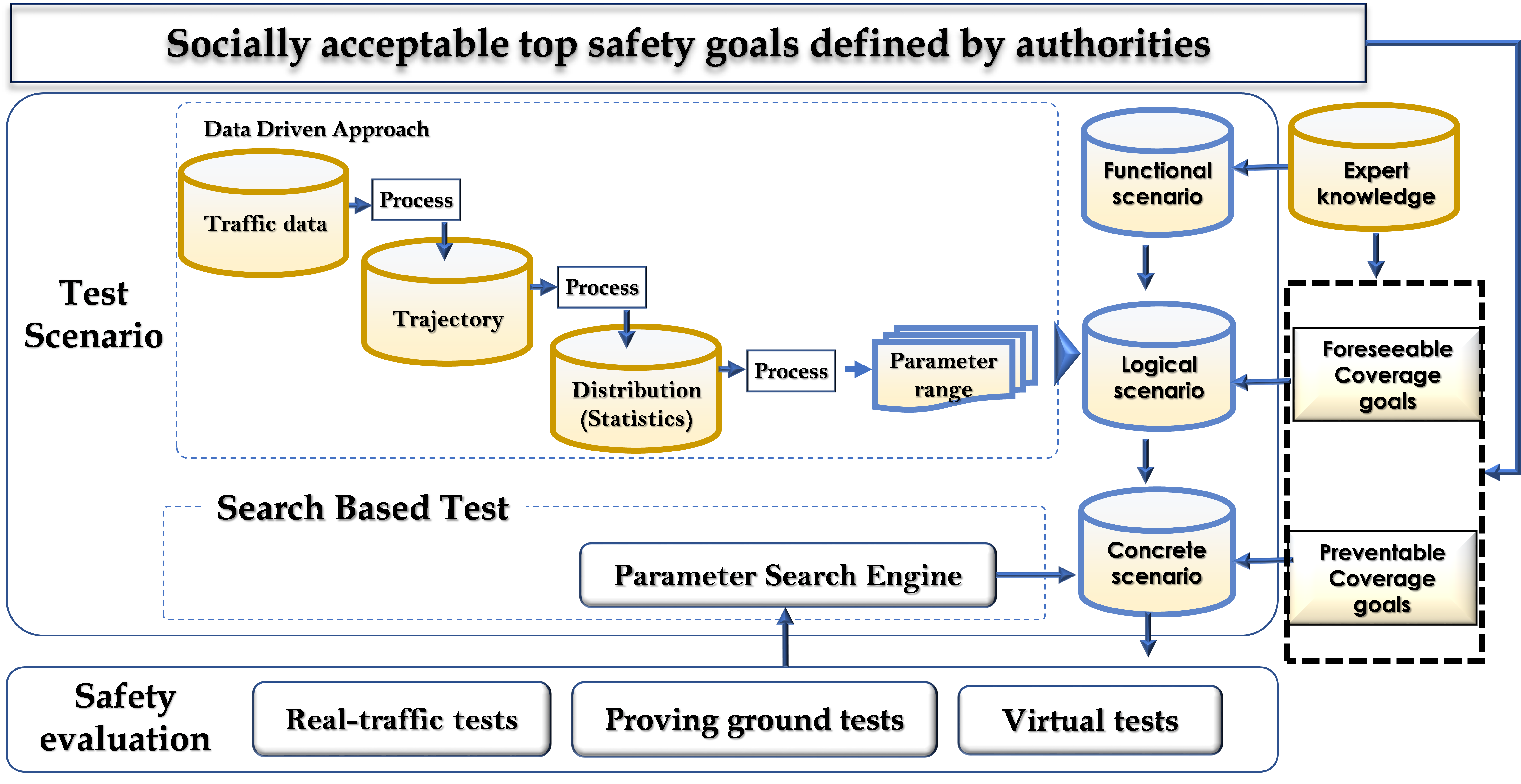
図:シナリオ生成と安全性評価プロセスの実現