シナリオ分析
軌跡データから各シナリオを定義するパラメータと分布を分析します。(他車が自車前方へカットインするシナリオを例に説明)
対象シナリオの抽出
抽出された軌跡データには、参照シナリオ[JAMA AD Framework]に該当するものものが含まれため、シナリオに該当する軌跡データを抽出する必要がありました。
このプロジェクトでは、該当するかを判別するアルゴリズムを使用して軌跡データからシナリオを抽出する方法を確立しました。
カットインシナリオを例に、シナリオを抽出することについて説明します。
図はカットインシナリオのパラメータ定義を示しています。
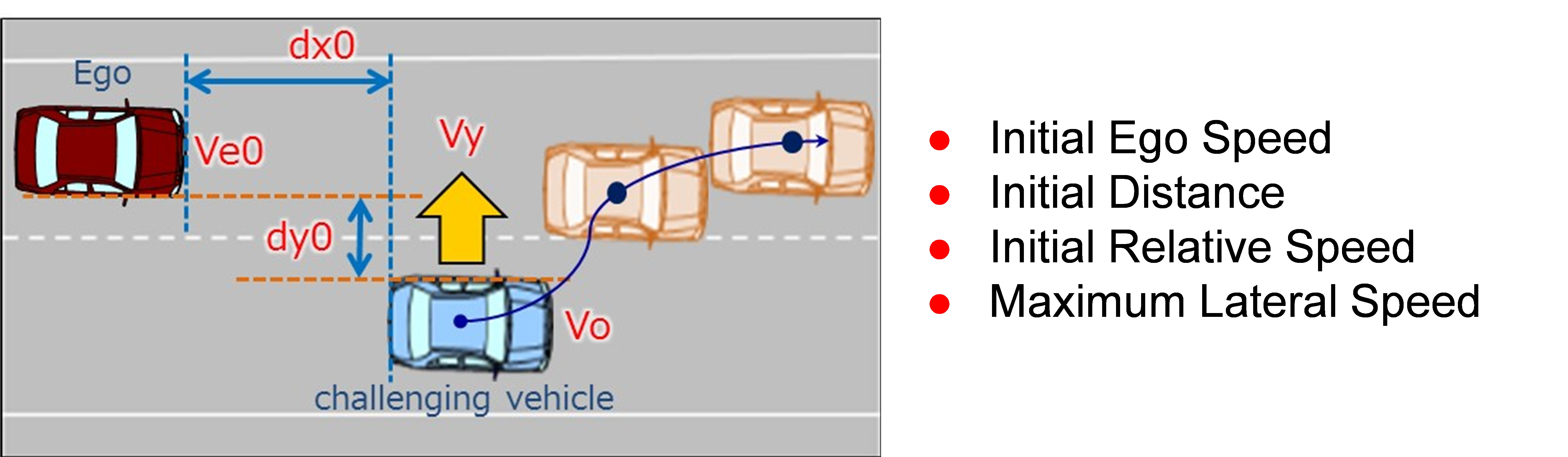
図:必要なパラメータの定義(カットインシナリオ)
パラメータ定義と以下の特徴に基づいて、カットインシナリオを抽出するアルゴリズムを作成しました。
- カットイン車両の横方向速度は同じ方向に一定のままである
- 他車が隣接車線から自車の車線に進入する
- 他車と自車の間に車両が存在しない
- 開始: 他車両の横方向速度が0から増加する
(車両の右側が正の値)
- 終了: 横方向速度が0に戻る
このアルゴリズムに基づいて実際の交通データから抽出された軌跡データを用いてシナリオを分析します。
パラメータ値の抽出
実交通(軌跡)データから抽出したカットインシナリオのパラメータを導出する過程を示します。[Nakamura et al. 2021]
この図は、2018年から2020年までに収集されたカットインシナリオのパラメータ分布例を示しています。
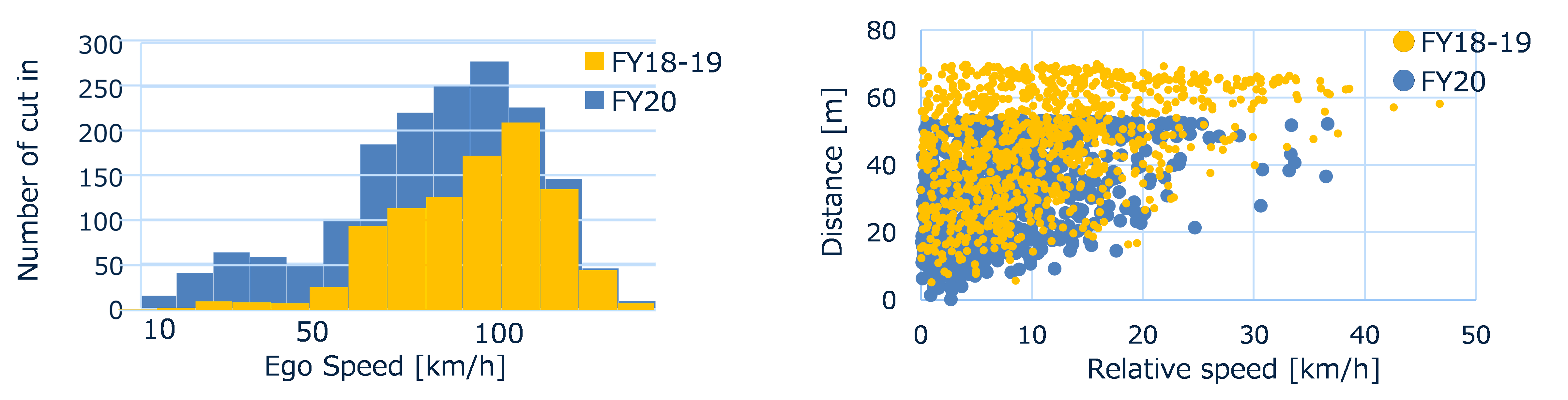
図:カットインシナリオパラメータの分布
パラメータ分布の推定
収集した実交通データは日本全国を網羅するものではないため、分布に偏りが生じる可能性があります。[Nakamura et al. 2021]
実交通におけるカットインのパラメータ分布について追加解析を行い、パラメータ分布を推定した。[Nakamura et al. 2021]
- β分布(有限および連続)によるパラメータ分布の推定
- パラメータ間の相関関係の考慮
- センサー範囲の制限と稀なケースに対する外挿
- 多次元パラメータ分布の推定
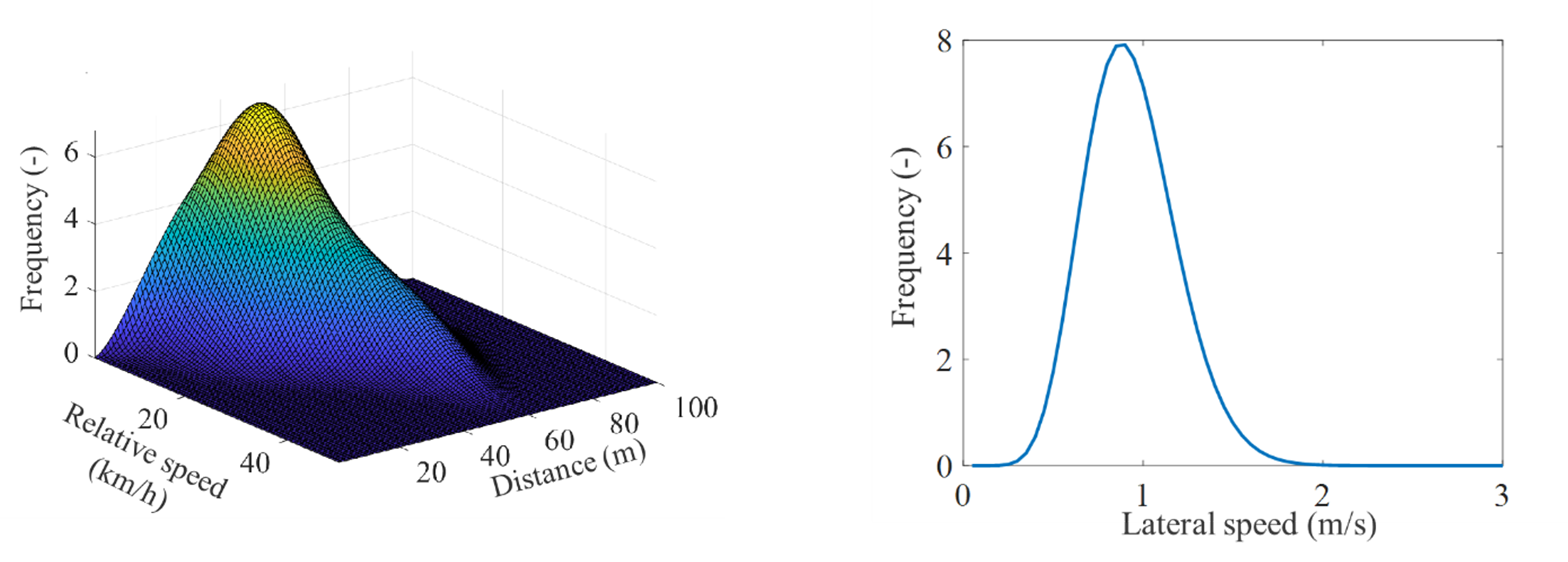
図:パラメータ分布の推定(カットインシナリオ)
SAKURAプロジェクトでは、これらの分析結果をエビデンスとして継続的に蓄積していきます。