交通データの収集と処理
交通データを収集する目的は、自車と周囲の車両の軌跡を分析し、Logicalシナリオの車両動作パラメータの範囲を定義することです。
SAKURAプロジェクトでは、計測車両と定点カメラ技術を用いてデータを収集しています。これらのデータの収集・分析技術は、SAKURAプロジェクトにおける研究開発を通じて確立されました。
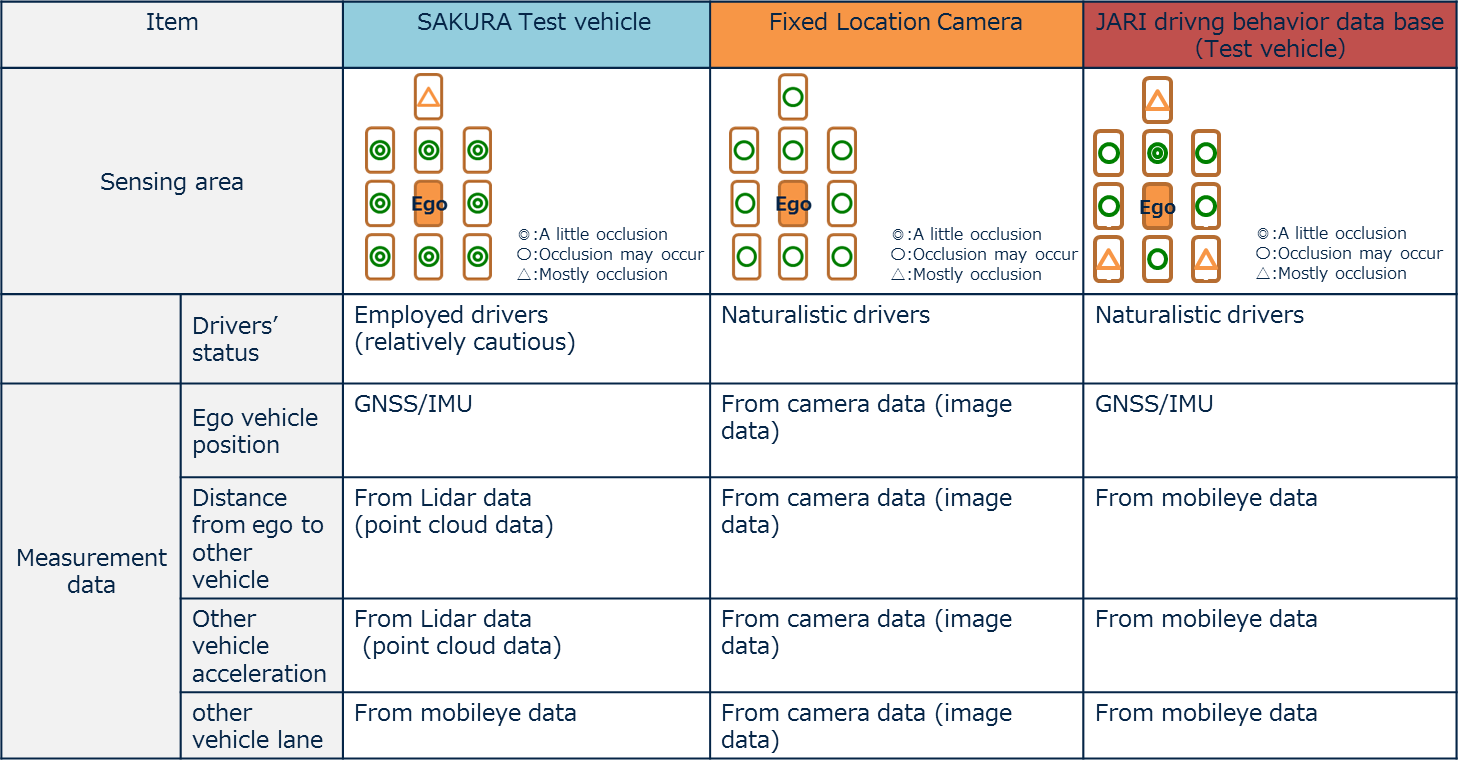
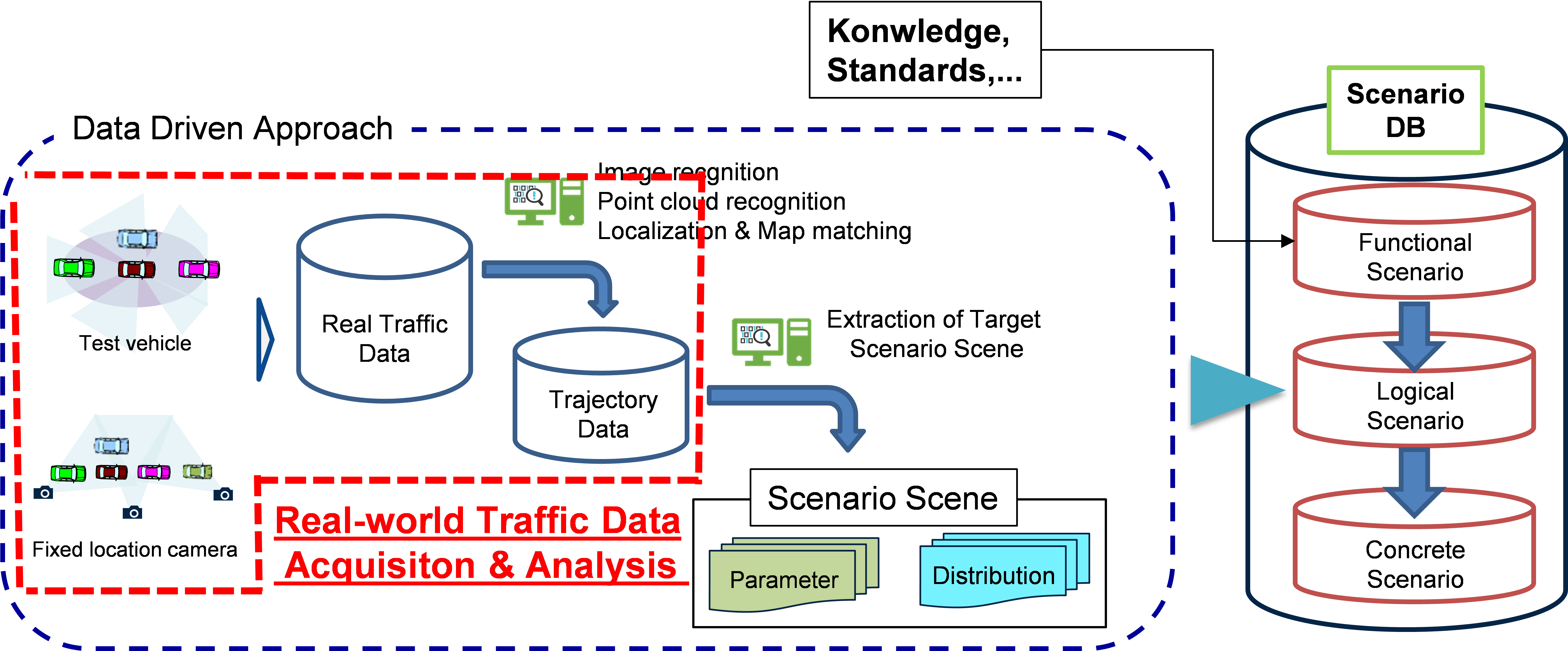
図:実交通データ収集システムと対応部分
※計測車両は、首都高・都市間高速道路を走行し、約3200時間のデータを収集しました。
※定点カメラは、交差点や分岐路など、位置依存性の高いデータに関して、10箇所のデータを収集しました。
計測車両を利用した交通データ収集
SAKURA計測車両仕様
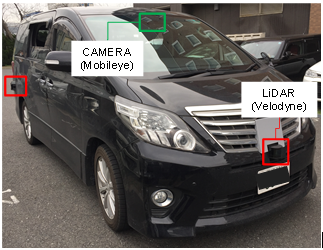
SAKURA計測車両は、複数のLiDARとカメラによって周囲の車両のふるまいを計測し、GNSS/IMUによって自車両の位置情報を計測します。
SAKURA計測車両で取得した交通データからの軌跡抽出
計測車両で収集されたデータについては、
- 点群認識による周辺車両の抽出
- GNSS/IMU情報と高精度地図情報を活用した位置推定
- 自車両と他車両の軌跡情報(数値)を抽出
- 自車両の軌跡は地上座標系で測定される
- 他の車両の軌跡は自車両の座標系で測定される
周辺車両の認識(点群認識)
軌跡の精度向上(位置推定とマップマッチング)
定点カメラによる交通データの取得
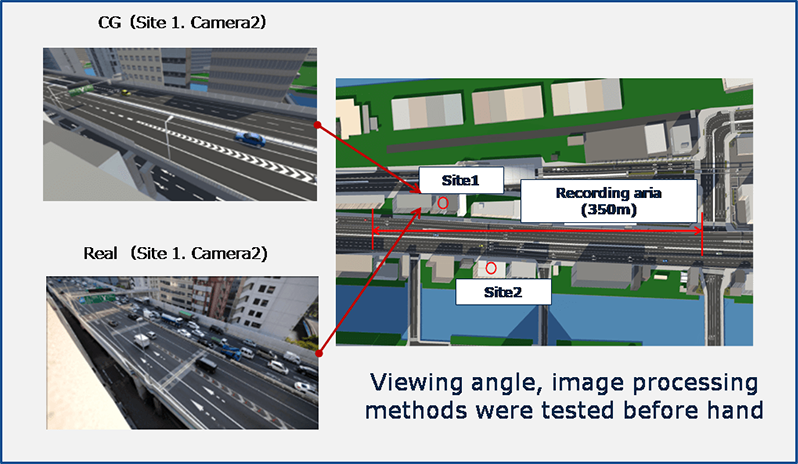
定点カメラの仕様
定点観測カメラでは、高層ビルの屋上などの計測地点に高画質カメラを設置し、実際の交通データを収集します。実際に計測する前にシミュレーションを用いてカメラ設置場所を選定し、その精度を検証しています。
定点カメラで取得した交通データからの軌跡抽出